Progetto
per la realizzazione
di un braccio robotizzato
Scheda controllo
ultimo aggiornamento 8 marzo 2010
|
|
Progetto
per la realizzazione ultimo aggiornamento 8 marzo 2010 |
|
|
|
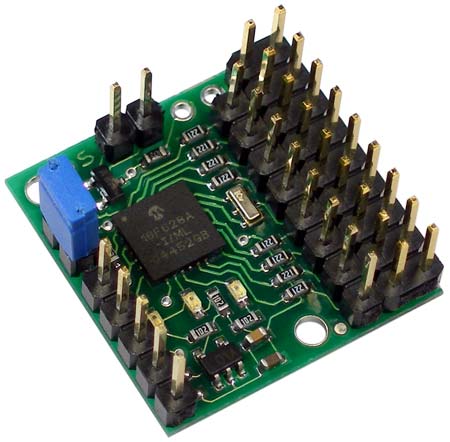
La scheda utilizzata per il controllo del robot è la scheda Micro serial servo controller della Pololu che può essere trovata sul sito Robot-Italy


 |
 |
| Specifiche Tecniche : | |
| Tensione Alimentazione | 5-16V |
| Consumo | 5 mA |
| Risoluzione | 0.5 ms (0.05 gradi circa) |
| Ampiezza impulsi | 0.25 - 2.75 ms |
| Numero di porte Servo | 8 |
| Tensione I/O | 0 e 5 V |
| Velocità seriale | 1200 - 38400 (autodetect) |
| Dimensioni | 23.1 x 23.1 mm |
Questa è estremamente compatta (misura
soltanto 23.1 mm di lato!) e può controllare fino
a 8 servocomandi tramite un PC connesso porta
seriale.
Nonostante le sue minuscole dimensioni è ricco di
funzioni.
Può controllare la velocità e la posizione di
ognuno degli 8 servi indipendentemente, la
velocità della porta seriale è rilevata
automaticamente nel range da 1200 a 38400 Baud e
diversi moduli possono essere utilizzati sulla
stessa linea seriale per controllare fino a 128
servi.
I 3 LED di stato e un convertitore di livello
seriale (RS232 -> TTL) costituiscono una soluzione
rapida ed efficace al problema di controllo dei
servi.
Questo servo controller supporta due protocolli di
comunicazione differenti.
La scheda è compatibile con lo standard del Mini
SSC II , è quindi possibile utilizzare tutti i
programmi e le utility sviluppate per questo
standard.
| Elenco revisioni | |
| 09/03/2010 | Aggiornato pagina |
| 19/05/2008 | Emissione preliminare |

