![]()


ultimo aggiornamento 16 ottobre 2011
|
ultimo aggiornamento 16 ottobre 2011 |
|
|
|
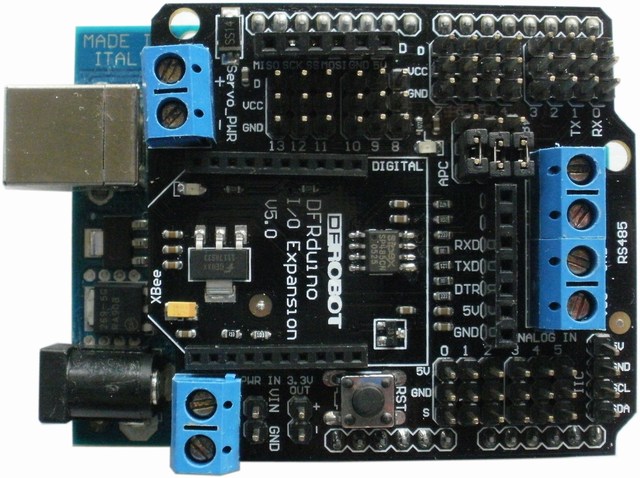
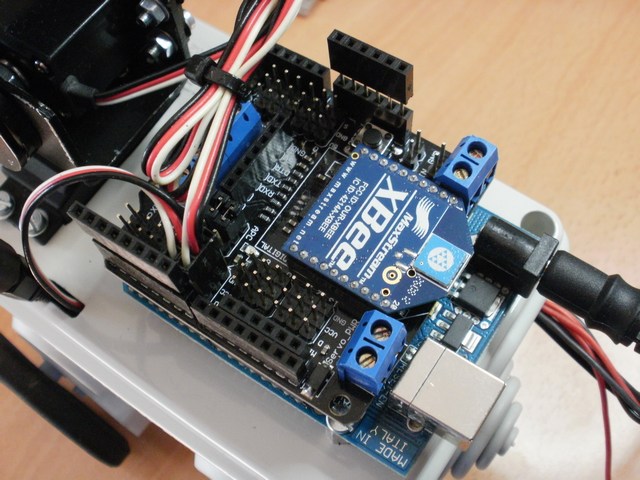
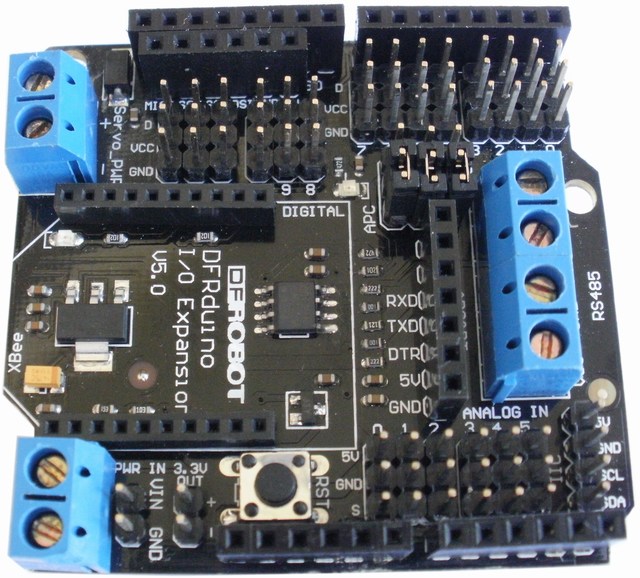
La scheda di espansione utilizzata per ArduinoBOT è la DFRobot I/O Expansion Shield V5 la scheda permette l'inserimento di un modulo XBee. A questa scheda vengono inoltre connessi i due servomotori che azionano il dispositivo Pan & Tilt per il controllo della telecamera.
![]()
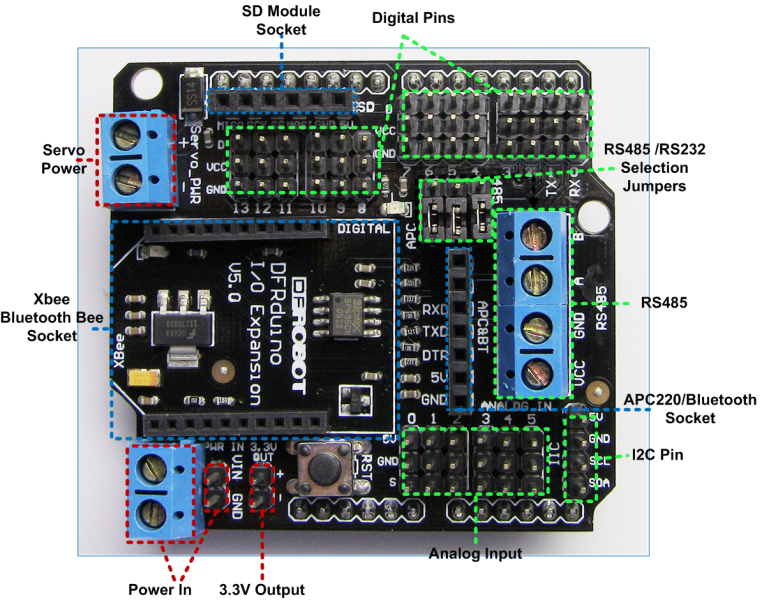
Specifiche
Supporto RS485
Supporto Xbee (Xbee pro)
Supporto Bluetooth
Supporto APC220
Supporto SD card lettura / scrittura
 |
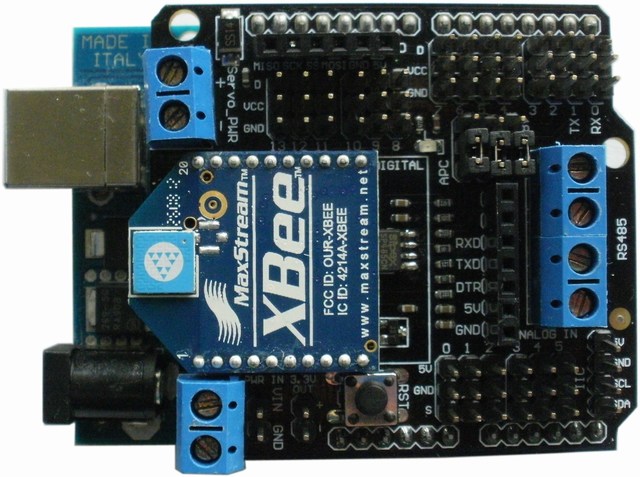 |

Zoccolo per Modulo XBee
Sulla scheda è presente un apposito zoccolo per l'installazione di un modulo Xbee (Xbee pro).
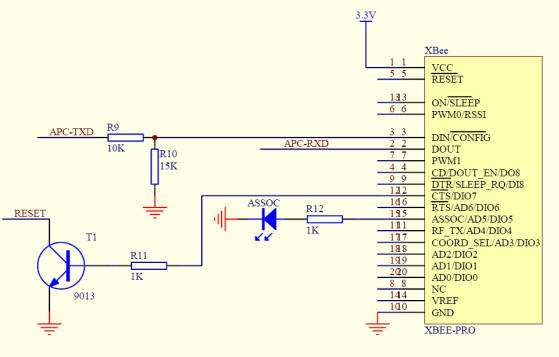
Alimentatore per modulo XBee.
Per l'alimentazione del modulo XBee è presente un apposito circuito che riduce la tensione di 5V a quella di 3.3V necessaria al modulo.
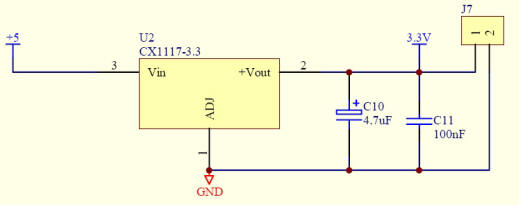
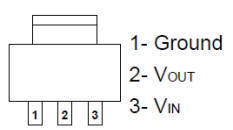
L'integrato CX1117 fà parte di serie di regolatori di tensione regolabili e fissi che sono progettati per fornire in uscita 1A corrente e di operare fino a solo 1V di differenza tra ingresso-uscita . La tensione di dropout del dispositivo è garantita a un massimo 1.3V con corrente di uscita massima, valori inferiori con correnti di carico inferiore.
| CX 1117 1A Low dropout voltage regulator | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
L'interfaccia RS485
Il bus di collegamento RS485 è generalmente formato da un cavo con due conduttori attorcigliati (twisted-pair) e una schermatura che collega i vari dispositivi.
Un bus formato da due soli fili è un bus detto half-duplex nulla toglie
di raddoppiare il bus portandolo a quattro fili e ottenendo così un bus
full-duplex.
Un buon bus RS485 lo si ottiene restando tra i 400 e i 500m di lunghezza
massima. Ovviamente riducendo la velocità del bus è possibile arrivare
anche a 1200m.
Poiché i moduli collegati sulla rete risentono anche notevolmente delle
differenze di massa che si vengono a creare, soprattutto su reti molto
lunghe, è consigliabile usare degli accoppiatori RS485 separati
galvanicamente.
La trasmissione e del tipo differenziale ovvero il segnale è il
risultato della differenza tra le tensioni dei due fili che compongono
il bus
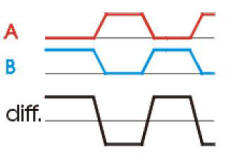
I trasmettitori RS485 mettono a disposizione (sotto carico) un livello
in uscita di ±2 V tra le uscite A e B, i ricevitori riconoscono livelli
di ±200 mV ancora come segnale valido.
Questa tecnica permette un'ottima immunità ai disturbi anche su tratte
di cavo molto lunghe.
Tipicamente la sezione del cavo può essere di 24 o 22 AWG per medie
distanze, e dovrà essere aumentata nel caso di lunghe tratte.
Per minimizzare le riflessioni, il primo e l'ultimo dispositivo della
rete devono avere una resistenza terminatrice collegata in parallelo
alla linea.
L'opzione sopra non è vera nel caso la linea sia fatta a stella per cui
la posizione della resistenza di terminazione andrà provata
sperimentalmente.
In questo tipo di rete, peraltro molto rara, si mette una resistenza di
terminazione sul centro stella e la seconda resistenza sul nodo più
lontano dal centro stella.
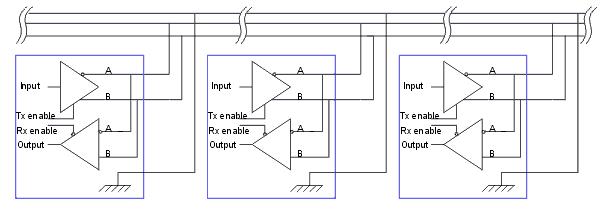
Lo standard RS485 teoricamente può supportare fino a 32 dispositivi
connessi sul bus (con i moderni 485 si arriva tranquillamente a 128 nodi
e con alcuni 485 particolari e per questo costosi si arriva sino a 256
nodi).
Tipicamente è necessario usare resistenze di terminazione il cui valore
varia da 120 a 560 ohm, si veda più avanti le spiegazioni su come
scegliere le resistenze di terminazione.
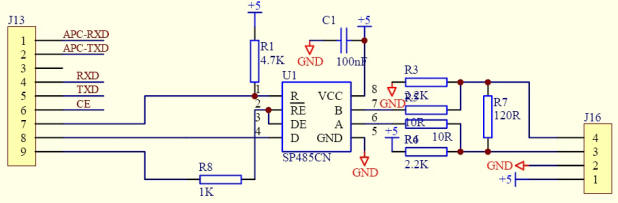
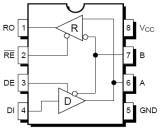
| SP485CN Low Power Half-Duplex RS-485 Transceivers | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
|
Pin# |
Name |
Description |
|
1 |
RO |
Receiver Output. |
|
2 |
RE |
Receiver Output Enable Active LOW. |
|
3 |
DE |
Driver Output Enable - Active HIGH. |
|
4 |
DI |
Driver Input. |
|
5 |
GND |
Ground Connection. |
|
6 |
A |
Driver Output/Receiver Input - Non-inverting. |
|
7 |
B |
Driver Output/Receiver Input - Inverting. |
|
8 |
Vcc |
Positive Supply 4.75V<Vcc< 5.25V. |
Modifica dei connettori
Per poter permette l'impilamento della scheda è possibile rimuovere gli attuali connettori maschi e sostituirli con connettori femmina con pin allungati.

 |
 |
| Elenco revisioni | |
| 16/10/2011 | Emissione preliminare |

