![]()


ultimo aggiornamento 23 marzo 2011
|
ultimo aggiornamento 23 marzo 2011 |
|
|
|
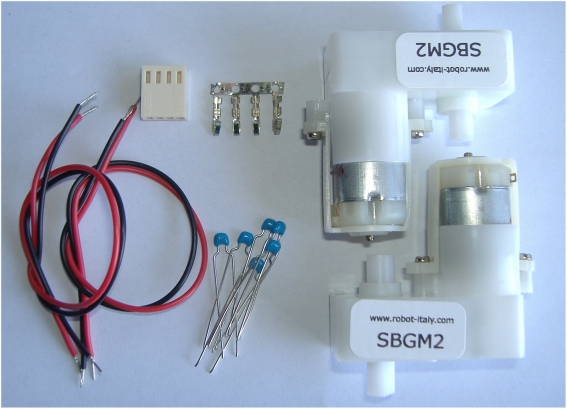
ArduinoBOT è mosso da due motoriduttori tipo
GM 2 - 224:1 Offset Shaft
prodotti dalla Solarbotics
ltd, questi hanno un rapporto di riduzione pari a 224:1.
Sono basati sul disegno originale di Mark Tilden per l'uso nel
BIOBugs & Robosapien e hanno avuto rispetto a quest'ultimi
una varietà di miglioramenti come alberi di uscita doppia e un
motore a più basso consumo di corrente.
Questo motoriduttore fornisce (se alimentato a 6V) una coppia di
stallo di 4.1 kg*cm, compiendo una rotazione di 360 gradi ogni
1,3 secondi, 46 giri/minuto.
La corrente di stallo, cioè la corrente assorbita
alimentando il motore a 6V quando è bloccato o in fase di
avvio è di 710 mA, mentre la corrente assorbita a vuoto
è di 50mA.
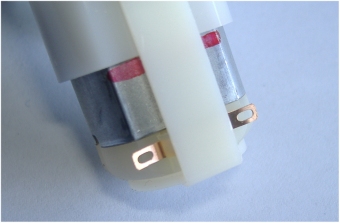
L'albero di uscita ha un diametro di 7 millimetri ed è del tipo
a
doppio piatto (occorre evitare di utilizzare l'uscita "D" - in
quanto non è destinata ad avere un carico di rotazione).
Il motoriduttore è fornito di una frizione che entra in funzione
a 0,43 N-m evitando il blocco dell'albero.
E' inoltre fornito di fori di fissaggio per viti.
Queste unità hanno un ingombro di 55mm x 48mm x 22,7 millimetri
di spessore, mentre pesa solo 31,4 grammi
![]()
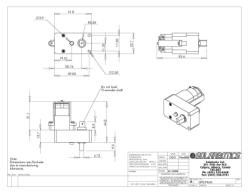
Disegno quotato
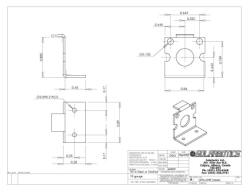
Disegno quotato

Verifica del motoriduttore
Dal sito del produttore possiamo ricavare i dati caratteristici del motoriduttori che sono riportati nella Tabella 1
Tabella 1 - Caratteristiche
(con tensione di alimentazione di 6V)
|
Quello più importante
è il valore della coppia, questo è, nella rotazione, l'equivalente della forza
nello spostamento lineare. Per spingere uno contenitore, più forza metto e più
accelerazione avrà il contenitore.
Lo stesso vale per una ruota, più coppia metto e più la ruota avrà
un'accelerazione maggiore. Nella tabella è riportata la coppia di stallo
(Stall Torque in inglese), che è la coppia massima che può fornire il motore, in
questo caso però il motore è fermo, e vale per il nostro motore 4.1 kg*cm.
Il dato che sarebbe necessario sarebbe quello della coppia nominale (rated
torque) che è, all'incirca, la massima coppia che assicura un funzionamento
continuo del motore, senza problemi, ma in questo caso non è riportato.
Possiamo considerare la formula approssimativa che indica il valore di coppia
nominale la metà della coppia di stallo.
Coppia nominale = Coppia di stallo / 2
Che per il nostro
riduttore è uguale a 2 kg*cm
Vediamo gli altri dati per la verifica riportati nella tabella 2
Tabella 2 - Dati di calcolo
|
La spinta disponibile sulla ruota fornita da ogni riduttore sarà pari a :
F=Coppia / raggio =2/3,25*2=1,23 kg
Dobbiamo però
considerare la presa delle gomme che su un fondo solido permette al
massimo una spinta pari al peso del robot moltiplicato per il coefficiente
d'attrito che puoi considerare mediamente come un 0.75.
Considerando il peso del nostro robot pari a 0,75 Kg, la spinta massima sarà
pari a 0,75*0,75=0,56 kg, da cui si deduce che la potenza fornita dai riduttori
è più che sufficiente.
Per quanto riguarda la velocità del robot, occorre calcolare la velocità
periferica, la velocità periferica è quella di un punto che si trova sulla
circonferenza di raggio più grande. Per definizione la velocità è il rapporto
fra lo spazio S percorso e il tempo t impiegato a percorrerlo. Un punto che
percorre una intera circonferenza copre uno spazio 2 π r; se percorre n
circonferenze lo spazio è 2 π r n; se il tempo impiegato è 60 secondi la
velocità sarà dato dalla formula
Che nel nostro caso vale 14,4 cm/s pari a 0,5 km/h, altro dato che possiamo ricavare è che d=2*π *r = 6.28 * 3,25 = 26.4 cm.
| Elenco revisioni | |
| 23/03/2011 | Emissione preliminare |

