|
|

|
|
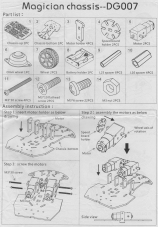
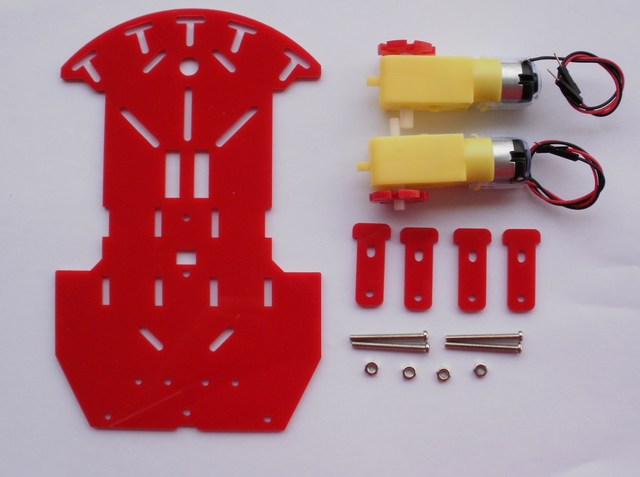
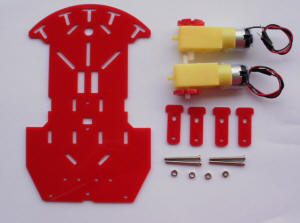
Particolari necessari: 2 motoridutori, dischi per encoder
|
|

|
|
Inserire i dischi encoder sull'albero, premendo con delicatezza
|
|
|
|
Particolari necessari: telaio inferiore, due motoriduttori, supporti per motoriduttori, 4 viti M3x30, 4 dadi M3
|
|
|
|
|
|
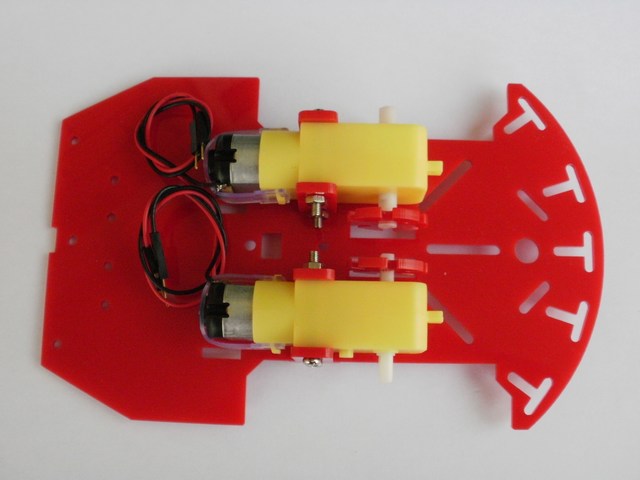
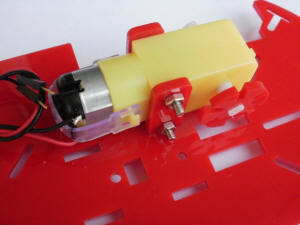
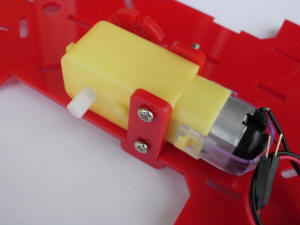
Inserire i supporti per riduttori nelle apposite scanalature e fissarle con le viti e i bulloni
|
|
|
|
Nello stringere i bulloni non forzare eccessivamente
|
|

|
|
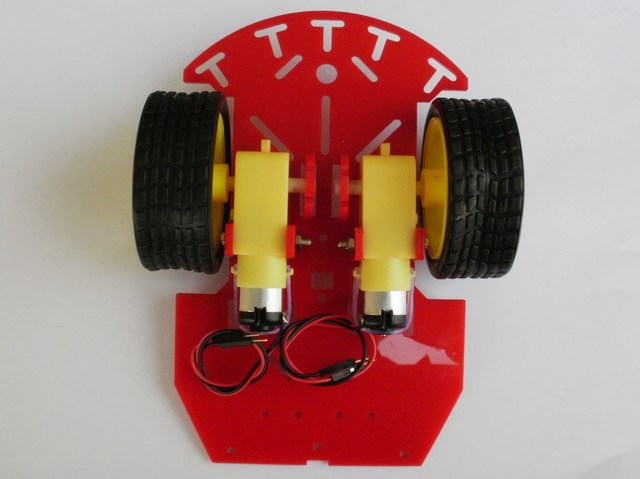
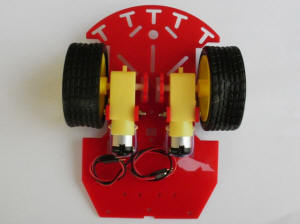
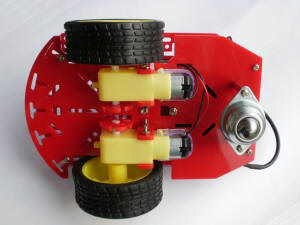
Come si presentano i due moriduttori fissati al telaio inferire
|
|
|
|

|
|
Particolari necessari: telaio inferiore con motoriduttori, due ruore
|
|
|
|
Inserire le ruote sugli alberi dei motoriduttori senza forzare eccessivamente
|
|
|
|
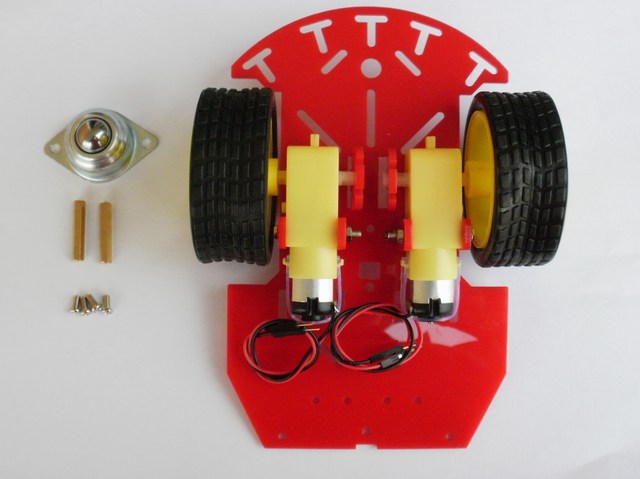
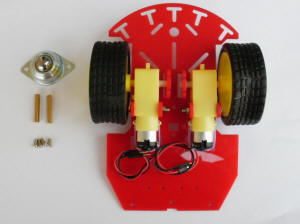
Particolari necessari: Telaio inferiore, ruota omnidirezionale, 2 distanziali L22, 2 viti M3x6 , 2 viti M3x10 svasate
|
|
|
|

|
|
Fissare i distanziali al telaio inferiore utilizzando le due viti M3x10 svasate. Fissare la ruota omnidirezionale ai distanziali usando due viti M3x6
|
|
|
|
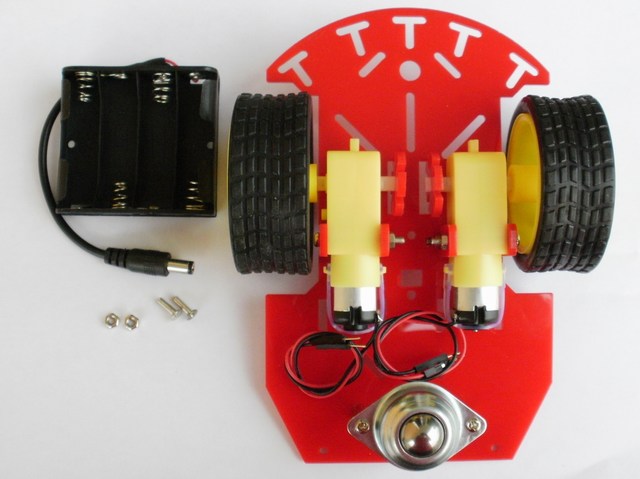
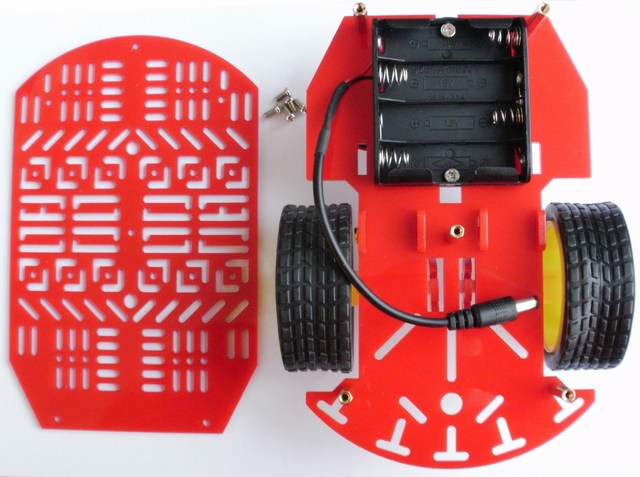
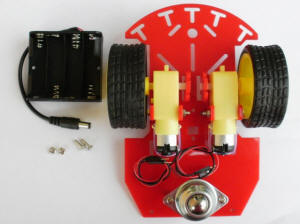
Particolari necessari: Portabatteria, 2 viti M3x6, 2 dadi M3
|
|
|
|
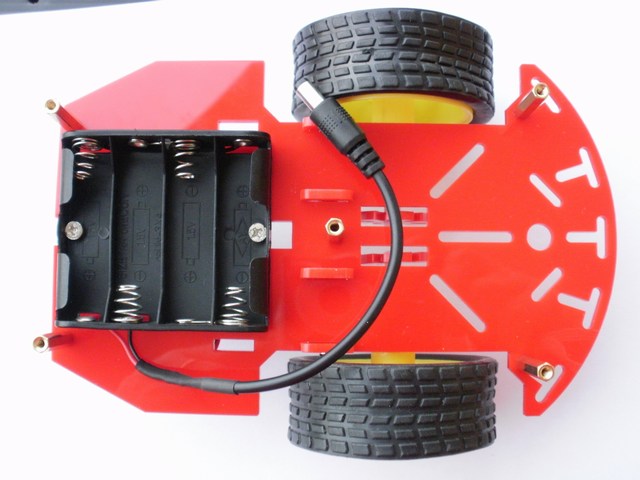
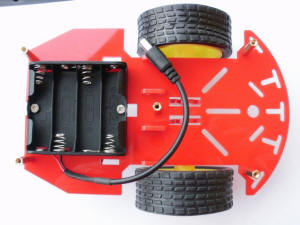
Fissare il portabatteria al telaio inferiore mediante le viti e i dadi.
|
|
|
|
|
|
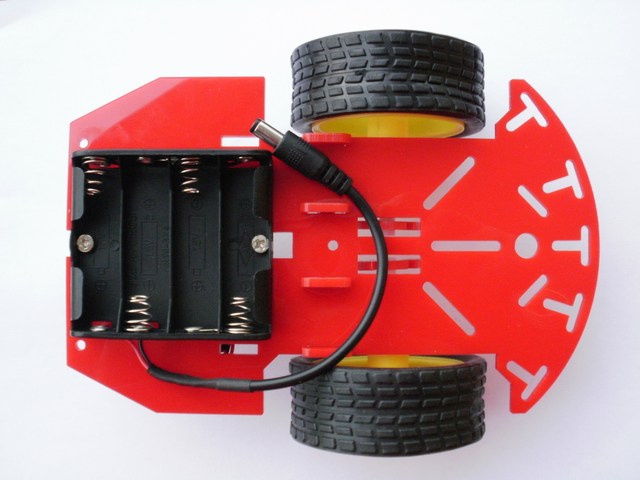
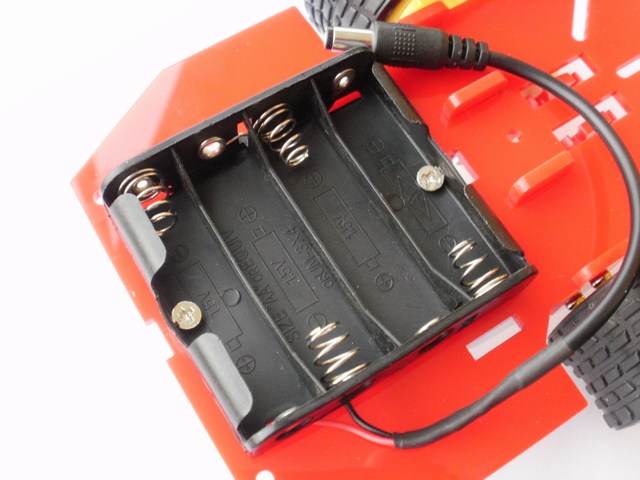
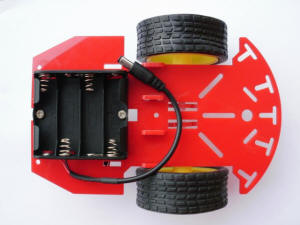
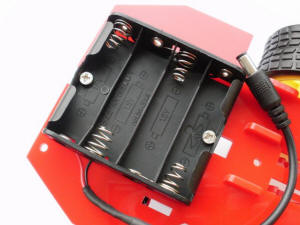
Dettaglio fissaggio del portabatterie
|
|

|
|
Altro dettaglio del portabatterie
|
|

|
|
Materiele necessario: 5 distanziali L=25, 5 viti M3x6
|
|
|
|
|
|
Fissare i distanziali al telaio inferiore mediante le viti
|
|

|
|
Dettaglio fissaggio distanziale
|
|
|
|
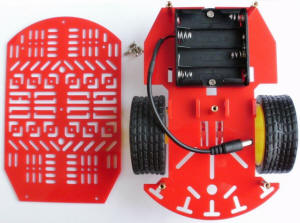
Particolari necessari: Telaio inferiore premontato, telaio superiore, 8 viti M3x6, 3 distanziali L=10mm
|
|
|
|

|
|
Inserire 4 batterie AA da 1,5 V all'interno del portabatteria
|
|

|
|
Fissare i distanziali L=10mm con le viti M3X10 per il fissaggio della scheda di controllo
|
|
|
|
Fissare il telaio superiore alla parte inferiore mediante 5 viti M3x6
|
|
|
|

|
|
Fissare la scheda di controllo ai distanziali
|
|

|
|
Montare la scheda controllo motore
|
|
|
|
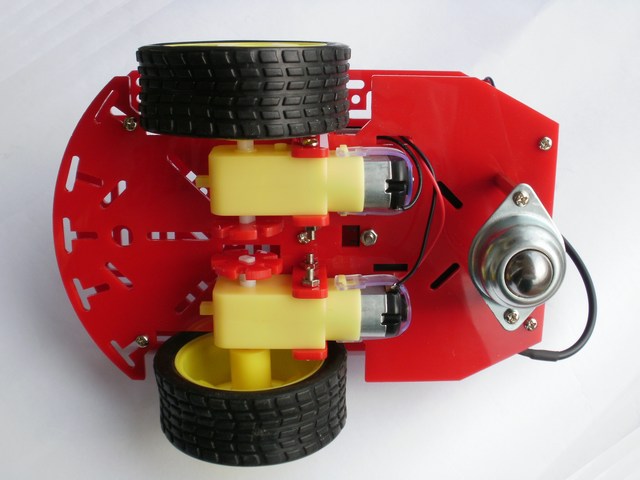
Dettaglio inferiore del robot montato
|
|
|
|
|
|
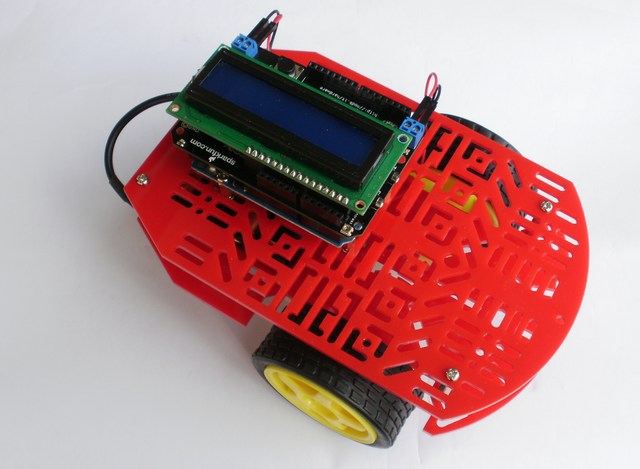
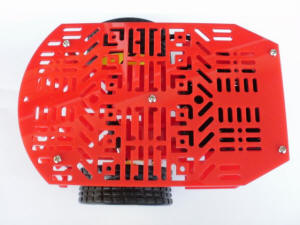
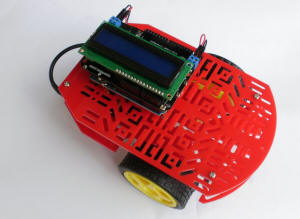
Vista di assieme del robot montato
|
|
|