
ultimo aggiornamento 11 novembre 2009
|
ultimo aggiornamento 11 novembre 2009 |
|
|
|
|
Il progetto
presentato in questa pagina è quello di un
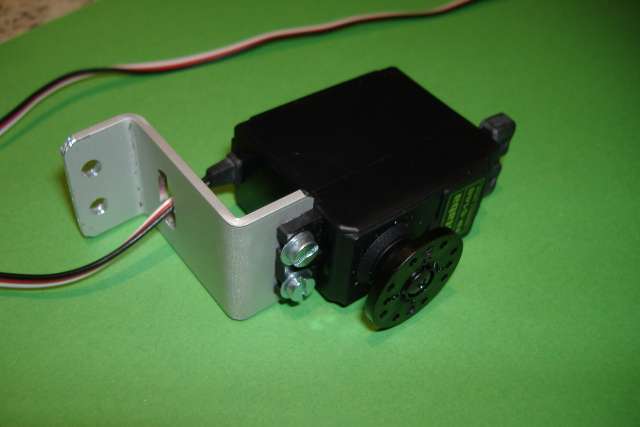
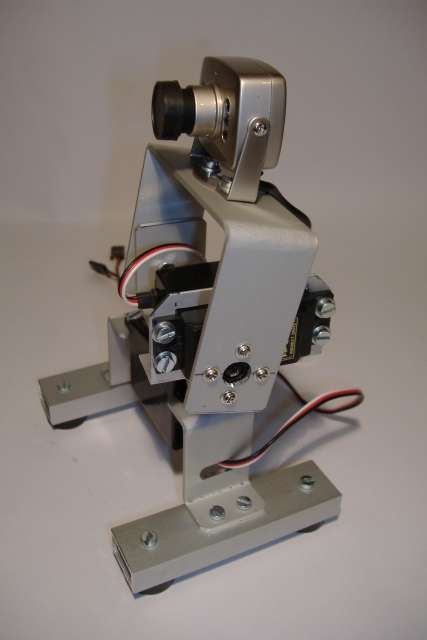
dispositivo di brandeggio chiamato anche Pan & Tilt. Il dispositivo gestisce la movimentazione di una telecamera nelle quattro direzioni: destra-sinistra (Pan) e alto-basso (Tilt). La struttura è costituita da profili in alluminio connesso con viti. I profilati possono essere facilmente acquistati presso una delle grosse catene di ferramenta. Per la rotazione sono stati utilizzati dei servomotori analogici prodotti dalla FUTABA modello S148, mentre la telecamera è una semplice CMOS in bianco e nero.
|
|

Versione del dispositivo Pane & Tilt comandato tramite la scheda Arduino e pilotata con un controller Nunchuck
Costruzione della parte meccanica
Passiamo quindi alla costruzione, prima di tutto dovremmo realizzare i
particolari numerati da 1 a 7 seguendo i disegni che è possibile
scaricare

Vista assieme del dispositivo
 |
 |
Gli attrezzi necessari sono: un seghetto da ferro, un trapano, possibilmente a colonna, delle punte da trapano di diverso diametro, una lima per smussare gli spigoli, un cacciavite a taglio e uno a croce, una pinza per il montaggio.

Assemblaggio del dispositivo
Una volta realizzati i particolari si passerà quindi ad assemblare il
telaio d’alluminio utilizzando i particolari e della minuteria.
Sono necessari:
• 10 viti testa cilindrica M3x10 (fissaggio servomotori e particolari
3-5)
• 8 viti testa cilindrica M3x15 (fissaggio particolari 7 e 8)
• 1 vite testa cilindrica M3x10 (cerniera di rotazione)
• 17 dadi M3
• 17 rondelle piane foro interno ø 3,2 mm.
• 8 viti autofilettanti ø 2 mm (fornite con servomotore)
• 4 gommini per supporto (particolare n°8).
Per il montaggio ci si aiuterà con un cacciavite a taglio, uno a croce e una pinza.
FASI DI MONTAGGIO
| Fase 1
|
Fase 2
|
|
Fase 3
|
Fase 4
|
|
Fase 5
|
Fase 6
|
|
Fase 7
|
Fase 8
Per dare stabilità si monterà alla base i due particolari 7, con i gommini particolari 8, utilizzando le restanti viti, dadi e rondelle. |
Servomotore
 |
|
|||||||||||||||||||||||||||||
CAMERA CMOS
 |
|
||||||||||||||||||||||||||||||||||||||
| Elenco revisioni | |
| 21/02/2012 | Aggiornato pagina |
| 11/11/2009 | Aggiornato pagina, inserito nuovo filmato |
| 17/07/2008 | Emissione preliminare |