![]()
![]()
ultimo aggiornamento 9 marzo 2010
|
ultimo aggiornamento 9 marzo 2010 |
|
|
|
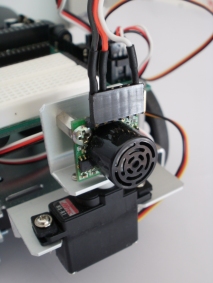
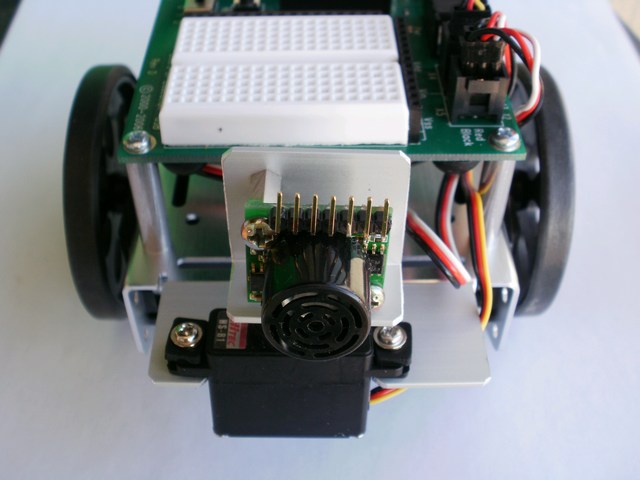
In queste pagine sono visibili le fasi preliminari di montaggio di un dispositivo per la navigazione del robot mediante un sensore sonar tipo EZ1. Il sensore viene azionato da un piccolo servo HITEC HS-81. Per il collegamento alla scheda BS2 si utilizza l’uscita del sensore EZ1 PW che fornisce in uscita un impulso la cui larghezza rappresenta la distanza. Il fattore di scala è pari a 147µs per pollice (25,4mm).
|
|
|

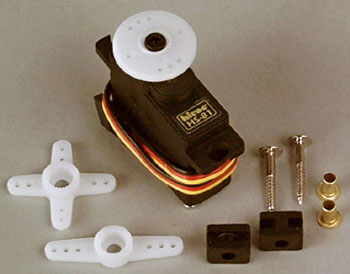
Caratteristiche tecniche del servo HITEC HS-81:
|
  |
 Particolari necessari alla costruzione della base del telaio |
 Telaio montato |
 I due servo forniti con il robot di produzione FUTABA |
 Per il montaggio vengono rimosse le crociere fornite |
 Particolari necessari per il fissaggio dei servomotori al telaio |
 I due servomotori montati sul telaio |
 Prossima fase fissaggio del porta batterie 4 batterie tipo AA da 1,5V - 6V totali |
 Porta batterie fissato tramite due viti al telaio del robot |
 I cavi dei due servomotori e del cavo di alimentazione vengono fatti passare attraverso l'apposito foro previsto sul telaio (protetto da un passacavo in gomma) |
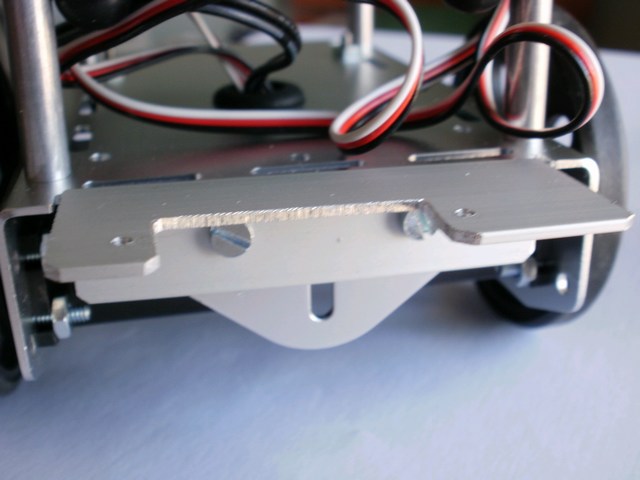
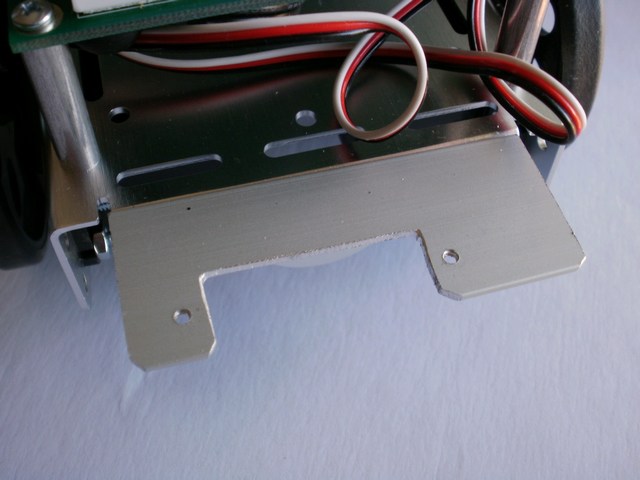
 Montaggio della staffa supporto sensore |
 § §Minuteria metallica necessaria per il montaggio del sensore |
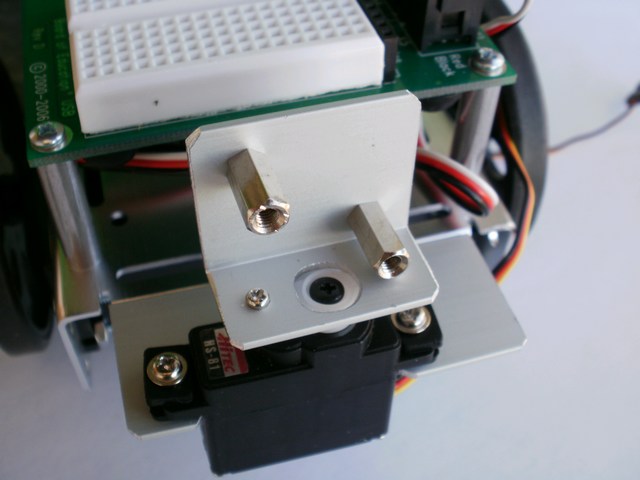 Montaggio dei distanziali |
 Montaggio ultimato |
|
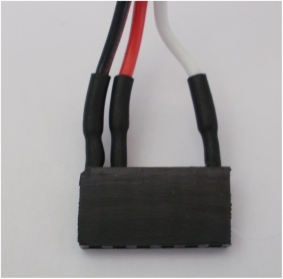
 Dettaglio del connettore con presenza di linguetta laterale che deve essere rimossa per l'inserimento nel connettore |
 Dettaglio della linguetta eliminata con l'utilizzo di una tronchesina |
| Elenco revisioni | |
| 09/03/2010 | Aggiornato pagina |
| 07/01/2010 | Emissione preliminare |