![]()


ultimo aggiornamento 24 aprile 2016
|
ultimo aggiornamento 24 aprile 2016 |
|
|
|
La scheda d'interfaccia
presentata permette di utilizzare il programma
ServoTester
for Robi realizzato da
ROBOMIC, il
circuito realizza una
comunicazione half-duplex con la scheda di controllo dei
servomotore tipo RS308
utilizzati per il robot.
La versione realizzata ?
simile a quella di ROBOMIC, a differenza di quest'ultima si
è scelto di
utilizzare il convertitore USB/RS232 tipo LPM335X.
Un sistema half-duplex fornisce una comunicazione in entrambe le direzioni, ma
con la possibilit? di usare soltanto una direzione alla volta (non
simultaneamente). Quando una parte comincia a ricevere un segnale deve poi
aspettare che il trasmettitore interrompa la trasmissione prima di poter
rispondere.
Un esempio di sistema half-duplex ? un sistema a due parti come quello dei
"walkie-talkie" radio, dove una persona deve utilizzare una parola (ad esempio
"Passo" o un'altra precedentemente decisa) per indicare la fine della
trasmissione, assicurando così che soltanto una delle due parti trasmetta in un
dato momento, siccome entrambe usano la stessa frequenza. (fonte wikipedia)
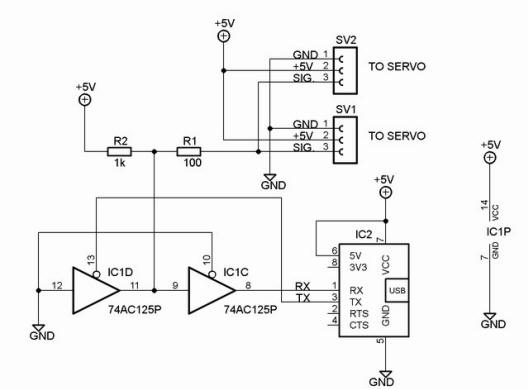
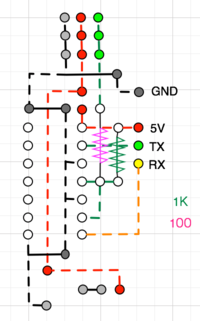
Lo schema è molto semplice, oltre al convertitore USB/RS232 tipo
LPM335X
si è utilizzato un integrato 74HC125P di cui sono
utilizzati due dei quattro buffer contenuti al suo interno.
L'alimentazione sia della parte elettronica della scheda sia dei servomotori, è
derivata dalla porta USB, ricordo che da questa porta dovrebbero essere
prelevabili 500 mA senza problemi.
Cavo autocostruito per collegamento servomotore RS308MD oppure
Circuito Half-duplex, con cui dialogare con il circuito interno al servo del robot Robi
Per maggiori informazioni vedere la pagina originale del blog ROBOMIC.
 |
 |

Possibili adattatori per conversione USB-Seriale TTL
|
Schede degli integrati utilizzati nei due convertitori
| FT230X USB TO BASIC UART IC | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del modulo |
| FT232R USB UART I.C. | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del modulo |
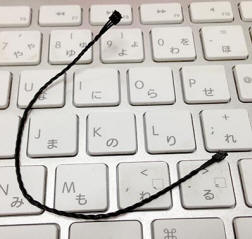
Costruzione cavo adattatore per servo
Una possibile soluzione è
quella di ricavare il cavo di collegamento "cannibalizzando" uno dei cavi
forniti con il servo, magari recuperato tramite l'acquisto di numero doppio del
fascicolo. A questo punto dopo aver tagliato il cavo si utilizza una spinetta
servo da assemblare femmina, ottenendo un cavo come visibile in foto.
Per maggiori informazioni vedere
pagina originale del blog ROBOMIC.
|
|||||||||||||||
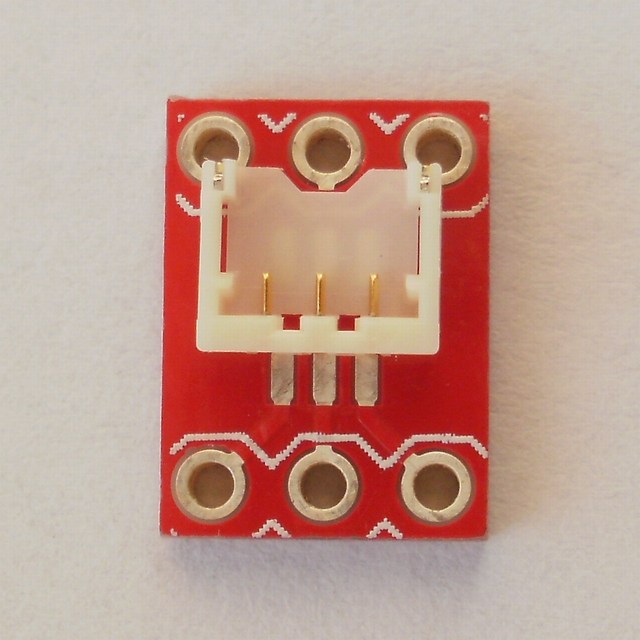
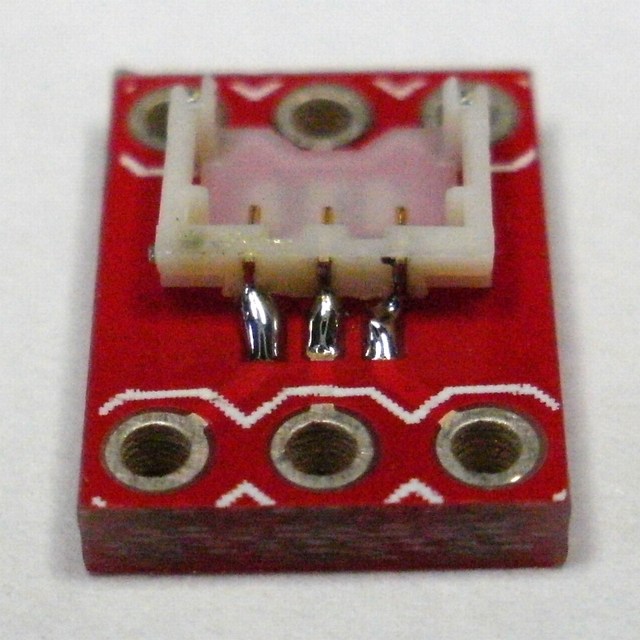
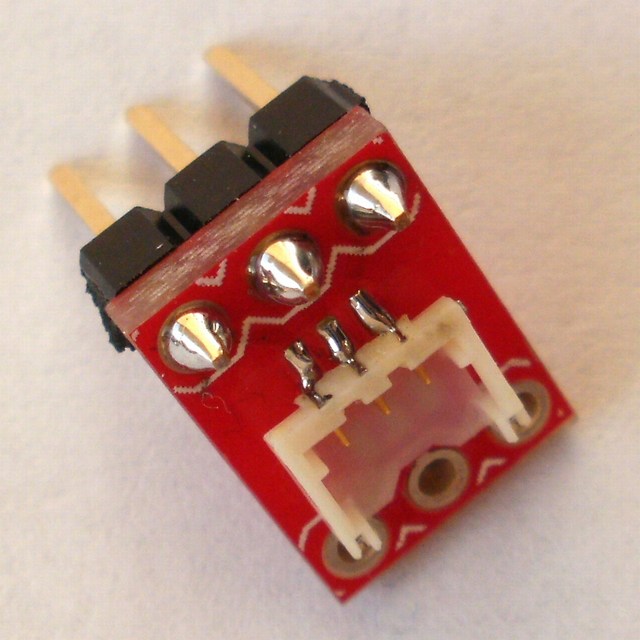
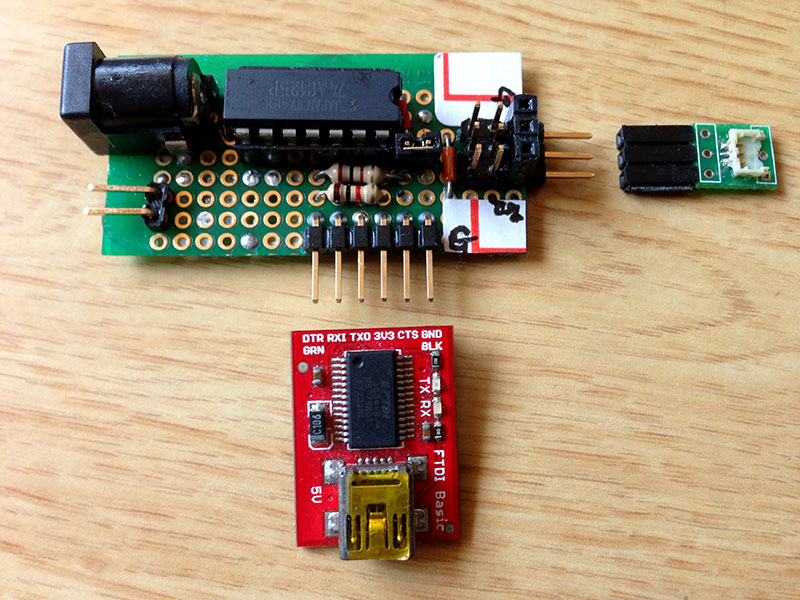
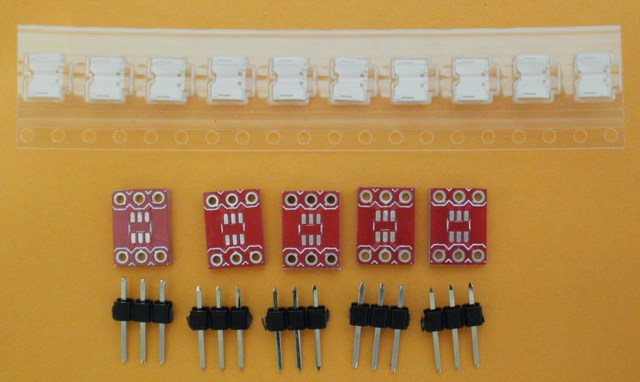
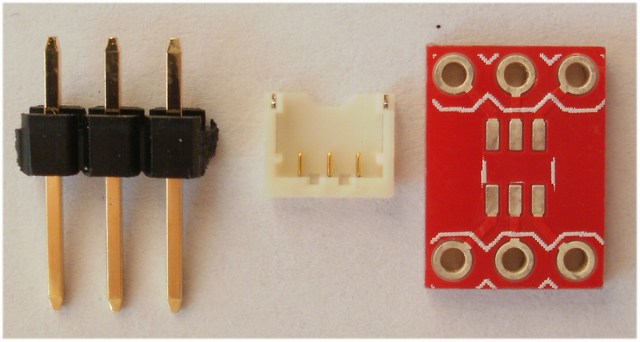
Costruzione adattatore per connettore
Se non si vuole sacrificare un cavo del robot, un'altra possibile strada è quella di realizzare un adattatore che unisca un connettore analogo a quello presente sul servomotore utilizzato per Robi e un normale pin strip passo 2.5mm.Per realizzate questo adattatore sono necessari:
Pin strip 3x1 maschio
Circuito stampato adattatore per package SOT23 a DIP6 per esempio quello venduto dalla Futura Elettronica (Cod. 7300-SOT23DIP6), e realizzato dalla SparkFun, si tratta di un piccolo circuito stampato che permette di adattare componenti con case SOT-23 a DIP6, le sue dimensioni sono 11,25 x 8 mm.
Connettore per CS, analoghi a quelli presenti sui servomotori di Robi, questi hanno un passo di 1,2 mm, con contatti a scatto. Sono prodotti dalla JST e possono essere trovati presso il sito Farnell con codice 1684117, il quantitativo minimo ordinabile è di 10.
|
|||||||||||||||
Per altre informazioni si può vedere la pagina originale del blog ROBOMIC.
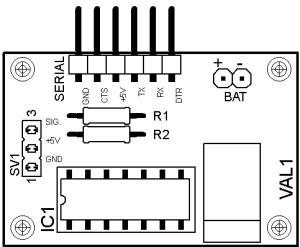
Schema dell'interfaccia per servomotori
|
|
Datasheet dei componenti utilizzati
| 74HC125 Quad buffer/line driver 3-state | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| LPM335X Convertitore USB- Seriale | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
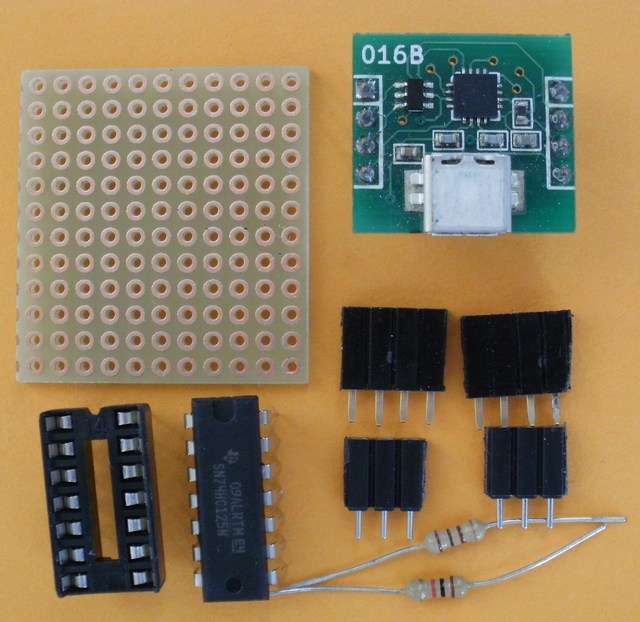
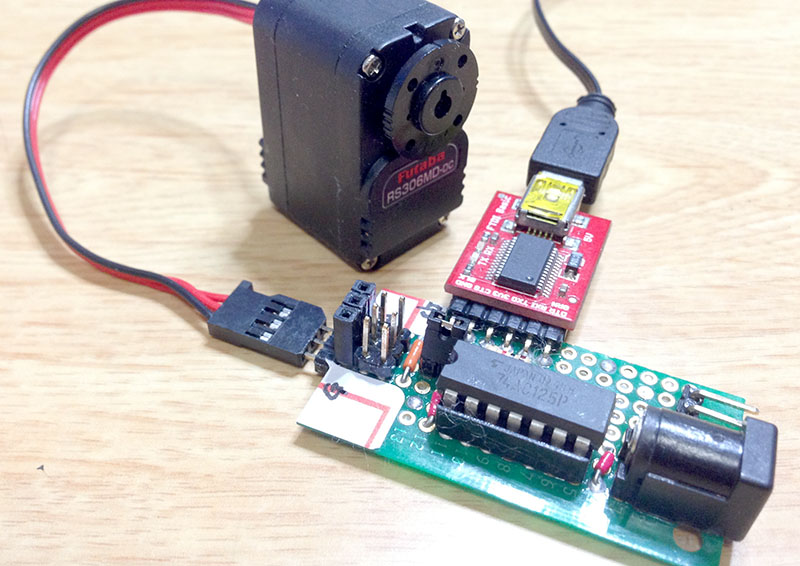
Realizzazione della scheda
Venuti in possesso dei componenti si potrà procedere alla costruzione della scheda, il prototipo è stato montato direttamente su una piccola basetta millefori, (12 righe + 11 colonne), ma potrà essere eseguita un circuito stampato. Sotto sono visibili le foto della realizzazione
 |
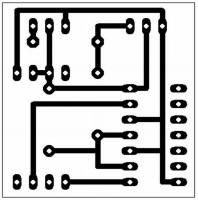 |
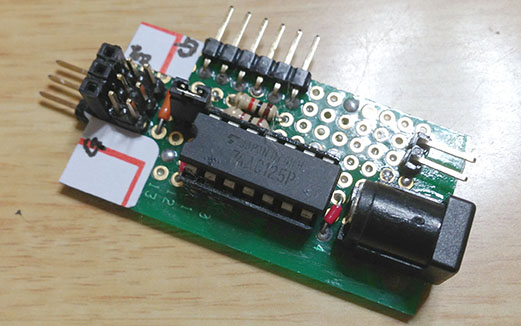
Foto della mia realizzazione
 |
 |
| Vista lato
componenti della scheda d'interfaccia |
Lato rame, le piste sono state realizzate tramite il collegamento diretto dei pad mediante stagno, oppure utilizzando del filo stagnato o spezzoni di reofori recuperati dai componenti. |
 |
 |
| Vista della scheda d'interfaccia, con il modulo convertitore USB/RS232 e adattatore servo montata | Dettaglio adattatore per servo |
 |
 |
| Modulo interfaccia | Integrato 74HC125 |
 |
|
| Connettore con servo collegato |
|
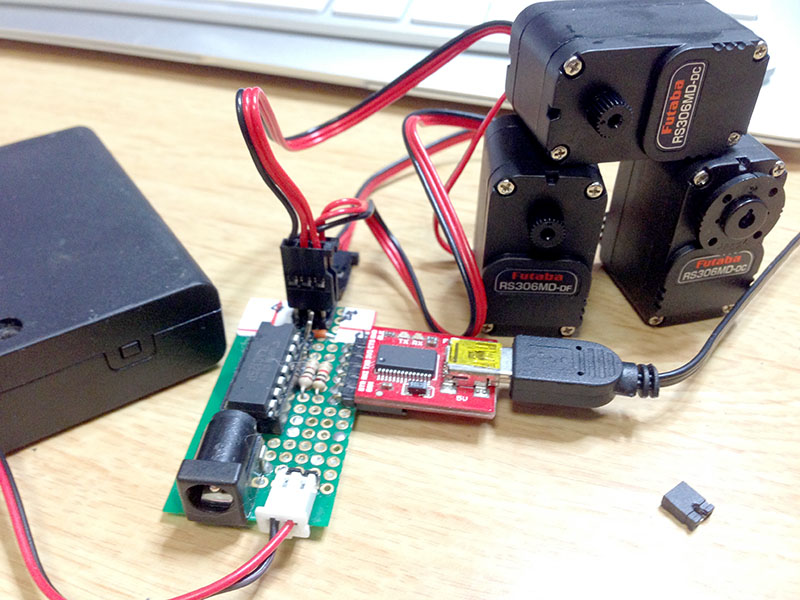
Test con utilizzo di USB-TTL con CP 2102
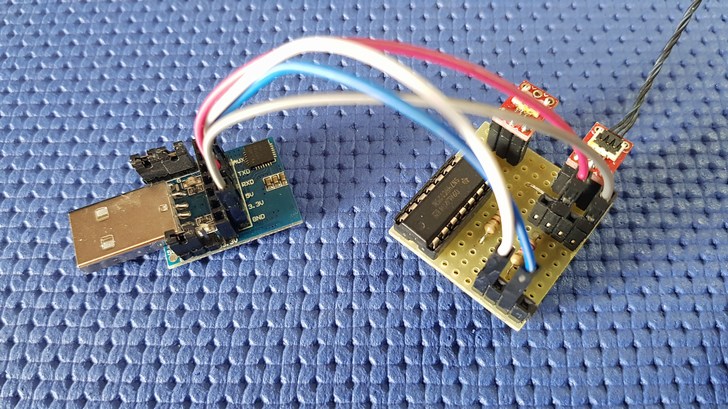
Foto del prototipo montato da Gioele Carboni
Ecco le foto del prototipo d'interfaccia realizzata da Gioele Carboni, per l'interfaccia con il PC è stato utilizzato il Modulo FTDI Basic Breakout - 5V, per il collegamento del servo, Gioele ha "sacrificato" la scheda servo tester in dotazione all'uscita N.3: l'ha tagliata e collegata come da foto la soluzione è stata scelta dall'autore anche perché la scheda servo tester non verrà da lui più utilizzata.
 |
 |
 |
Foto del prototipo montato da Giuseppe Marturano
Ho costruito il modulo half-duplex ,
seguendo minuziosamente le istruzioni prese dal sito Adrirobot . Non
disponendo di basette , acidi e il necessario per disegnare circuiti
stampati , mi sono procurato una basetta millefori , un paio di zoccoli
per integrati e qualche pezzo di filo di rame saldato sui contatti , con
il seguente risultato. Quindi , non avendo neanche il connettorino della
JST ( ho fatto un ordine alla FARNELL ma avrei dovuto acquistare un
quantitativo minimo di 10 pezzi di tutto il materiale necessario , ho
lasciato perdere ! ) , mi sono ingegnato nell’utilizzare la stessa
scheda del servotester di De Agostini come “ prolunga “ per la mia
schedina , quindi con molta attenzione , e l’uso di una lente , ho
seguito le piste di rame che collegano il connettore dei servi sulla V2
per poter “ intercettare “ i punti dove tagliarle e quindi inserire la
mia schedina , con l’ausilio di due comunissimi jumper rubati da una
vecchia scheda che avevo in un cassetto :
I punti che ho interrotto sulla V2
Ho saldato i jumper direttamente sulle piste precedentemente scavate .
Per assicurarmi che non si staccassero trascinando i restanti settori di
pista ramata , li ho rinforzati con della colla a caldo
Quindi inserendo i terminali jumper , si ripristineranno i collegamenti
originali . Successivamente ho testato il funzionamento originario della
V2 su un servo preprogrammato di Robi ; una volta reso conto del suo
perfetto funzionamento , sono passato alla fase successiva : togliere i
cappucci jumper per finalmente inserire la mia schedina e collaudarla :
Inserendo i cavi nei terminali degli jumper che sono collegati al
connettore del servo , si evita che i segnali e l’alimentazione , vadano
verso il
Processore della V2 impedendone l’eventuale danneggiamento e
l’alimentazione della V2 che rientri verso la mia schedina . A questo
punto inserisco il cordoncino dei tre cavi nella mia schedina :
Finalmente posso collaudare la mia schedina che ha funzionato come
descritto nel sito di Adrirobot , alla perfezione ….Grazie Adriano !!
Giuseppe Marturano
 |
 |
 |
 |
LPM335X - Installazione Drivers
Il primo passo per
l'utilizzo dell'interfaccia per i servo di Robi è l'installazione
dei driver VCP (Virtual COM Port) per il convertitore
LPM335X, per fare questo occorre seguire la seguente procedura:
1) Scaricare il pacchetto ZIP contenente i driver per LPM335X dal
sito
del produttore.
2) Scompattare il pacchetto all'interno di una cartella
3) Collegare il convertitore LPM335X alla porta
USB del PC
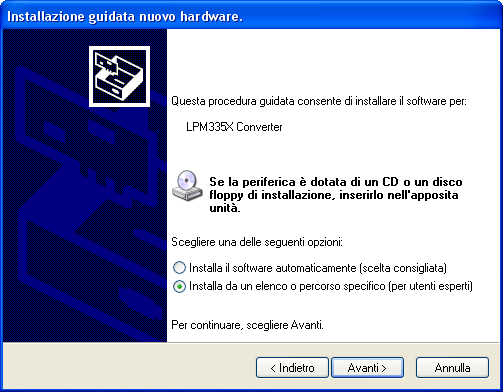
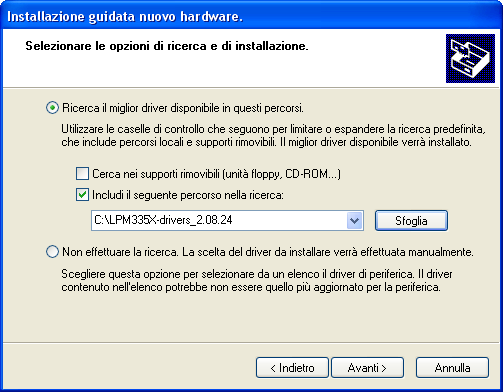
4) La periferica verrà rilevata ed apparirà la seguente finestra. Eseguire la
selezione mostrata in figura, poi cliccare su Avanti:

5) Nella seguente
finestra selezionare l'opzione per installare il driver da un percorso
specifico, poi cliccare su
![]()
6) Selezionare la
cartella in cui i driver sono stati scompattati come mostrato nella seguente
figura, poi cliccare su
![]()
7) Apparirà la
seguente finestra, cliccare su
![]()
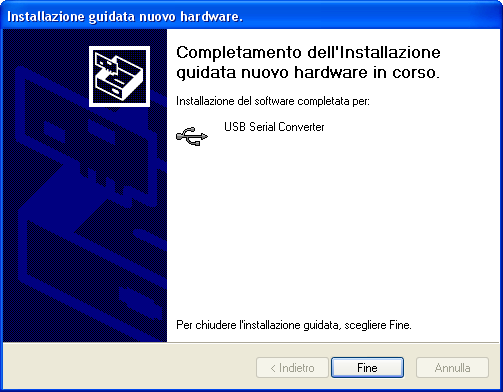
8) Appariranno
nuovamente le finestre mostrate dal punto 4 al punto 7, ripetere esattamente gli
stessi passi.
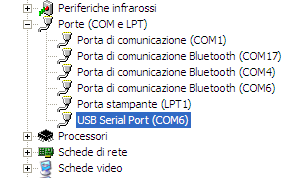
9) Complimenti, l'installazione è completata! Ora puoi vedere la porta COM
virtuale che è stata creata all'interno di "Gestione Periferiche":
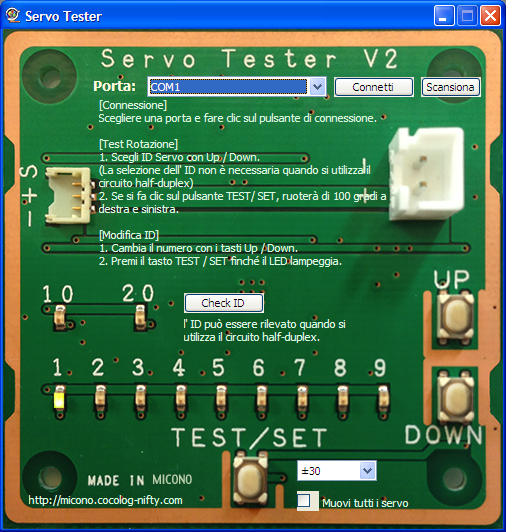
Utilizzo della scheda d'interfaccia
Per l'utilizzo della scheda occorre utilizzare il programma ServoTester for Robi realizzato da ROBOMIC, per il suo caricamento e uso vedere l'apposita pagina.
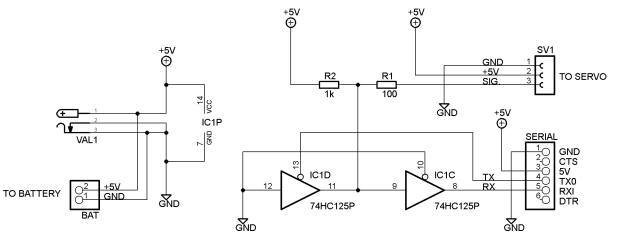
Schema originale realizzato da ROBOMIC
|
|
|
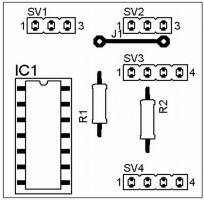
Circuito stampato e disposizione componenti
 |
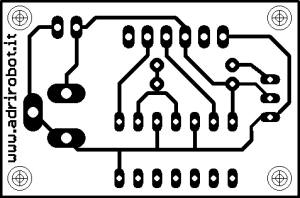 |
Foto della scheda realizzata da ROBOMIC
Dettagli dell'utilizzo della scheda ROBOMIC
|
|||||||||||||||
| Elenco revisioni | |
|
24/04/2016 |
Inserito foto della realizzazione di Giuseppe Marturano |
|
24/01/2015 |
Inserito foto della realizzazione di Gioele Carboni |
|
11/06/2014 |
Inserito schema e foto del prototipo della scheda di controllo |
|
16/04/2014 |
Emissione preliminare |