![]()
![]()

ultimo aggiornamento
27 gennaio 2012
|
|
|
|
|
|
Per il funzionamento del robot
è necessario l'installazione di un sensore chiamato accelerometro.
|
|
||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|

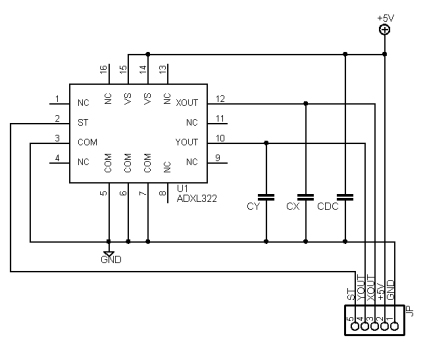
Schema elettrico (non ufficiale)
|
|
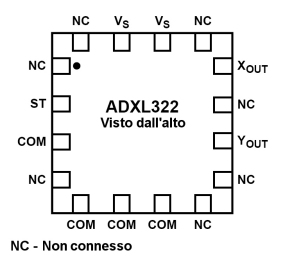
Ecco il micro modulo ACCELEREOMETRO, con
il chip
ADXL 322 montato. Andrà inserito post calibrazione
dei servo. Nella foto di destra è visibile la scheda di controllo con evidenziato il connettore dove va collegato il sensore. Notare il pin cerchiato di rosso, esso serve come riferimento per l'inserimento del sensore, in corrispondenza del quale andrà inserito il pin segnato con il numero 1, di colore bianco.
|
|
ADXL322 Analog Devices
Alcune delle caratteristiche
sono :
|
|
Foto del sensore di accelerazione del robot Robonox
 |
 |
| Lato frontale | Lato posteriore |
| Elenco revisioni | |
| 27/01/2012 | Aggiornato pagina |
| 17/03/2008 | Aggiornato pagina |
| 09/02/2007 | Emissione preliminare |