![]()


ultimo aggiornamento 3 ottobre 2015
|
ultimo aggiornamento 3 ottobre 2015 |
|
|
|
Shield con circuito gestione motori, dispositivo Pan & Tilt, sensori
Questo modulo viene utilizzato all'interno del progetto RoboYún, in quanto il motor Shield della Infineon, presenta un solo ponte H, per cui può gestire un solo motore DC nei due sensi di marcia, oppure due motori DC nello stesso senso di marcia.

Per questo motivo nell’azionamento dei motori sono utilizzati dei motor shield con intergrati tipo L293, SN754410, L298, che hanno al loro interno 4 ponti H, il che permette di gestire due motori nei due sensi di marcia.
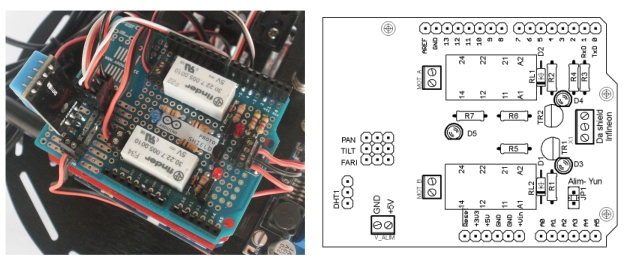
Per aggirare il problema si è realizzato un apposito
shield su cui sono montati due relè a doppio contatto, che permettono di
invertire il senso di rotazione dei motori, indipendentemente dal senso dato dal
modulo Infineon, che in questo caso viene utilizzato solo come regolatore della
velocità di rotazione tramite la gestione PWM.
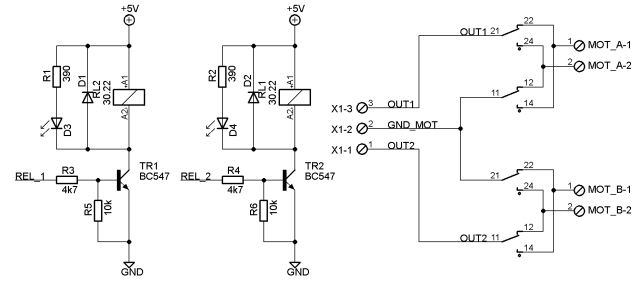
Il segnale proveniente dallo shield Infineon è applicato alla morsettiera X1,
dove arriva ai due relè a doppio scambio controllati tramite i due transistor
TR1 eTR2 pilotati dalle porte D2 e D4.
L’attivazione dei relè è segnalato anche tramite i due Led D3 e D4., nel
circuito sono poi presenti i diodi D1 e D2 che hanno il compito di scaricare
rapidamente tutta l'energia accumulata nella bobina mantenendo la tensione
inversa a valori accettabili e non dannosi per gli altri componenti.
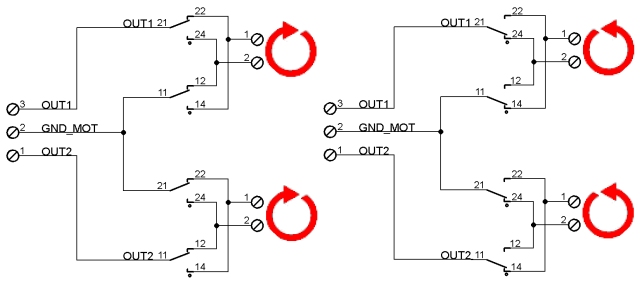
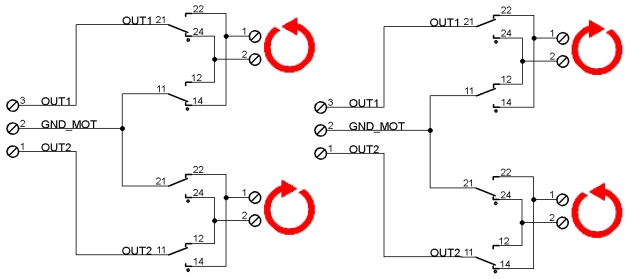
Dettaglio della sezione gestione dei relè controllo rotazione motori.
Sulla scheda sono inoltre presenti i connettori per il collegamento dei due servo del dispositivo di orientamento della webcam, il connettore per il sensore di temperatura/umidità e uno per il pilotaggio del circuito dei fari.
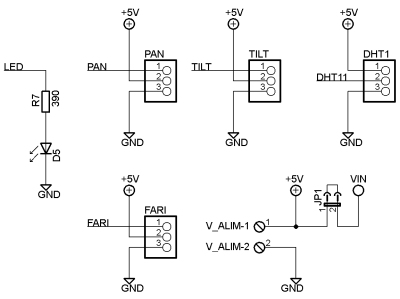
Sullo shield è poi montato un led di colore blu
controllato dalla porta D9 che è utilizzato per segnalare quando il robot è
pronto ad accettare i comandi.
L’alimentazione +5V proveniente dal modulo regolatore è fornita alla morsettiera
V_ALIM, dove tramite il ponticello JP1, viene trasferita al pin VIN per
alimentare la scheda Arduino YUN.
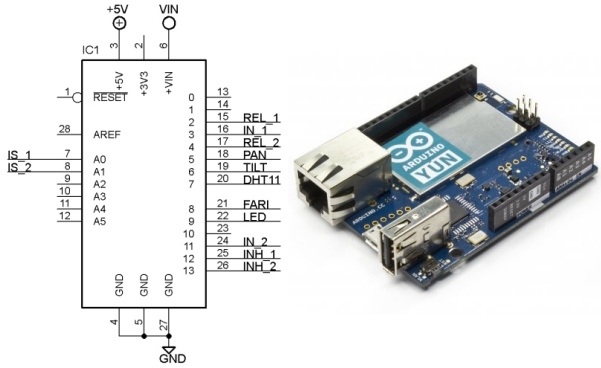
La funzione dei pin ingresso/uscita è riassunta in questa tabella:
|
L’elenco dei componenti per la sua costruzione sono:
|
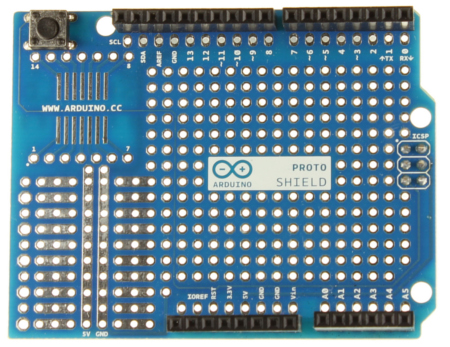
I componenti sono montati su una scheda prototipo tipo Proto shield R3 prodotta da Arduino.
| Elenco revisioni | |
|
03/10/2015 |
Emissione preliminare |

