![]()


ultimo aggiornamento 29 novembre 2010
![]()
![]()
![]()
![]()
![]()
![]()
|
|
ultimo aggiornamento 29 novembre 2010 |
|
|
|
|
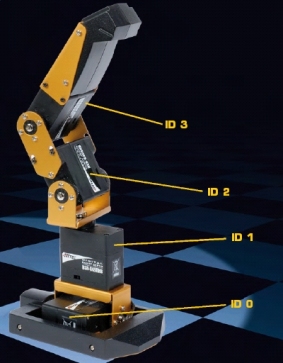
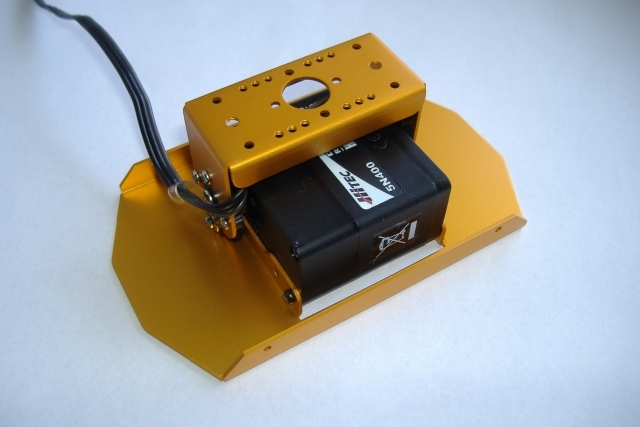
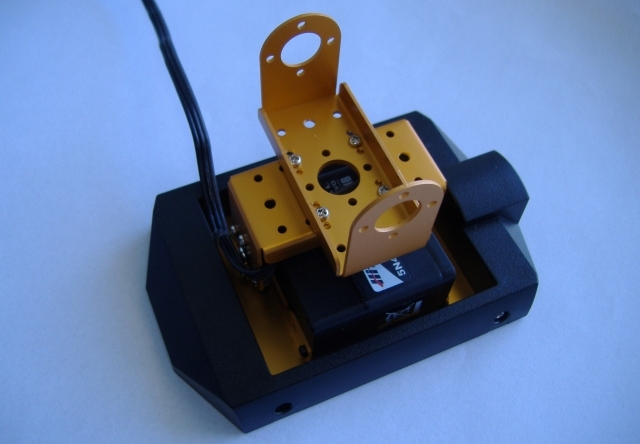
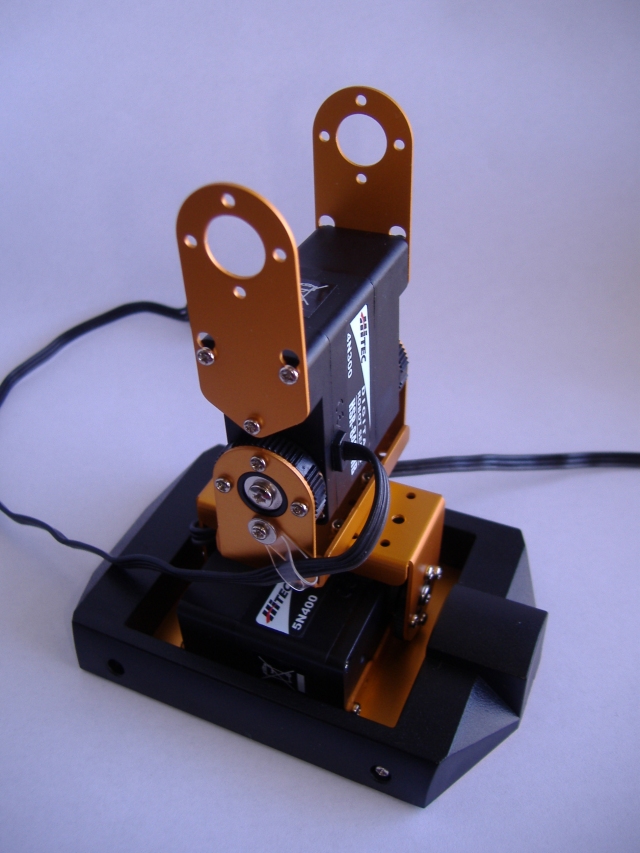
Nella prima
fase del montaggio si procede all'assemblaggio di un braccio robotico,
costituito da 4 servomotori o, in versione semplificata, da 3; richiama
i 'robot arm', i primi veri robot industriali della storia.
|
|
|---|

Foto delle fasi di montaggio di RobotArm
|
|---|

Versione con 4 gradi di libertà
|
| Elenco revisioni | |
| 29/11/2010 | Aggiornato la pagina con sostituzione dei filmati con analoghi pubblicati su YOUTUBE |
| 09/09/2008 | Inserito filmato versione Roboarm con 4 gradi di libertà |
| 03/09/2008 | Inserito fotoversione Roboarm con 4 gradi di libertà |
| 07/07/2008 | Inserito programmi di prova |
| 10/06/2008 | Inserito fascicoli copertina fascicoli 18-19-20-21-26-27 |
| 05/05/2008 | Inserito fascicoli 24-27 |
| 17/03/2008 | Inserito fascicoli 12-23 (copertine 14-18) |
| 07/01/2008 | Inserito fascicolo 10-11 |
| 03/12/2007 | Inserito fascicolo 8-9 |
| 16/11/2007 | Inserito fascicolo 6-7 |
| 15/10/2007 | Inserito fascicolo 5, completato con foto dei blister e copertine |
| 29/08/2007 | Inserito fascicoli 3-4 |
| 04/08/2007 | Emissione preliminare |