![]()

COMPLETA
ultimo aggiornamento 14 gennaio 2008
![]()
![]()
![]()
![]()
![]()
![]()
|
ultimo aggiornamento 14 gennaio 2008 |
|
|
|
|
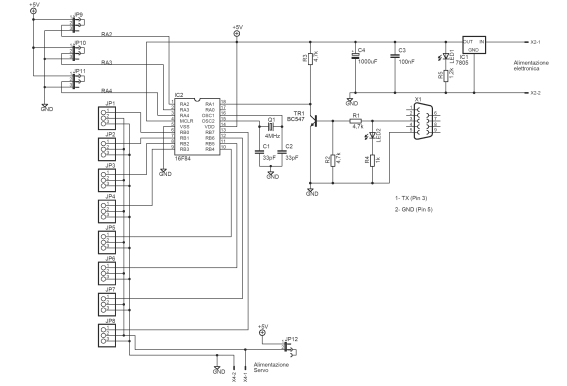
Il circuito presente in queste pagine serve per pilotare tramite un PC contemporaneamente un totale di 8 servocomandi. Questa versione è stata realizzata con l'aiuto di Lorenzo Petenatti. Il circuito è derivato da quello presente sul presente sito
interface de commande pour 8 servomoteurs, contrôlé par une liaison série Dove è possibile reperire il progetto originale (il sito è in francese) compreso la descrizione del funzionamento. Dal sito è inoltre possibile trovare il programma sia per la sua gestione che per la programmazione del PIC.
Dettaglio connettore a 9 pin femmina per il |
 |

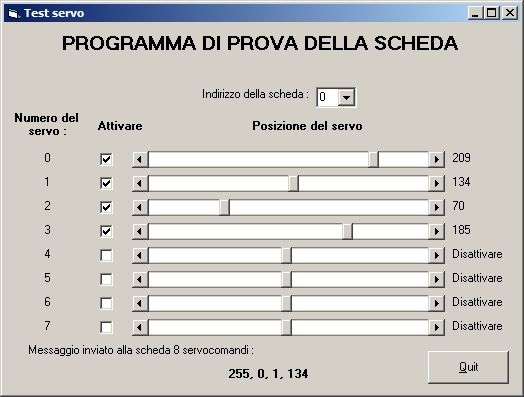
Il programma è scritto in VISUALBASIC ed è completo di sorgente per cui
è possibile personalizzarsi l'interfaccia.
Il circuito utilizza il famoso PIC 16F84, su di esso è inoltre presente
un'interfaccia molto semplice per il dialogo tramite la RS232 con il PC.
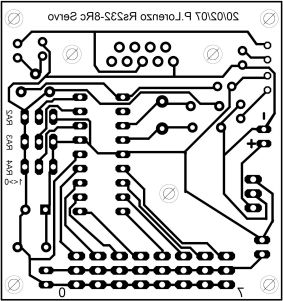
Per la realizzazione ho preparato un' apposito circuito stampato.
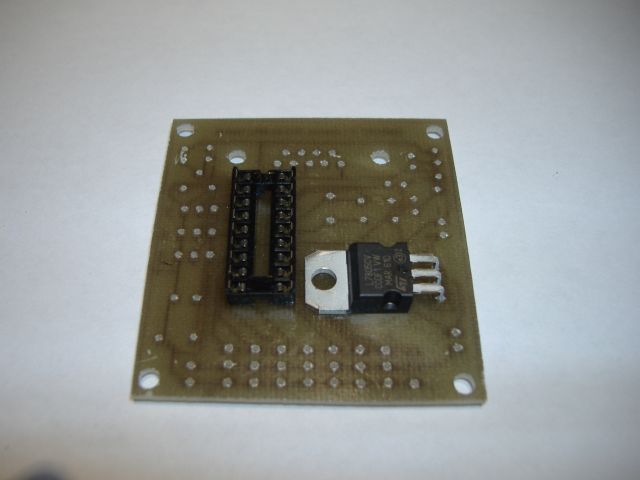
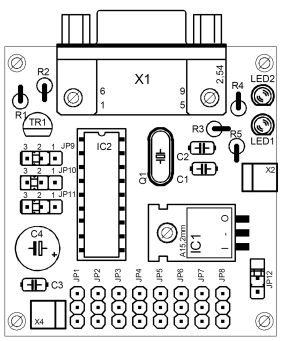
Una volta realizzato il circuito stampato
e saldato i vari componenti seguendo la
disposizione di componenti si
dovrà programmare l'integrato PIC 16F84.
Si scaricherà il file
8servos.hex e lo si
trasferirà tramite un'apposito programmatore,
per esempio quello della Futura
Elettronica tipo
7100-FT386
comandato dall'ultima versione, la 4.22 del programma EPIC della
MELABS

Si caricherà quindi il programma il Visualbasic vb8servos.exe e lo si lancerà. Agendo sui cursori, si muoveranno i servo ad esso collegati.

Per commenti,
e informazioni aggiuntive
|
|
|
||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
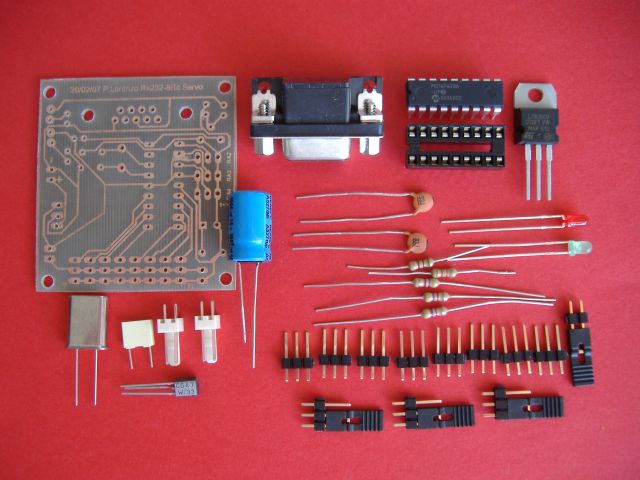
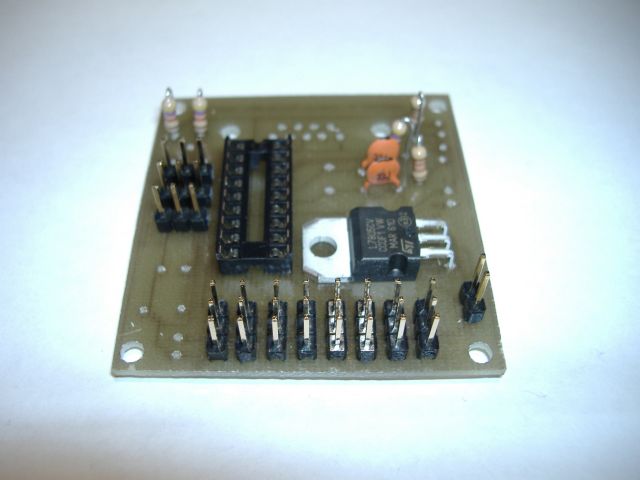
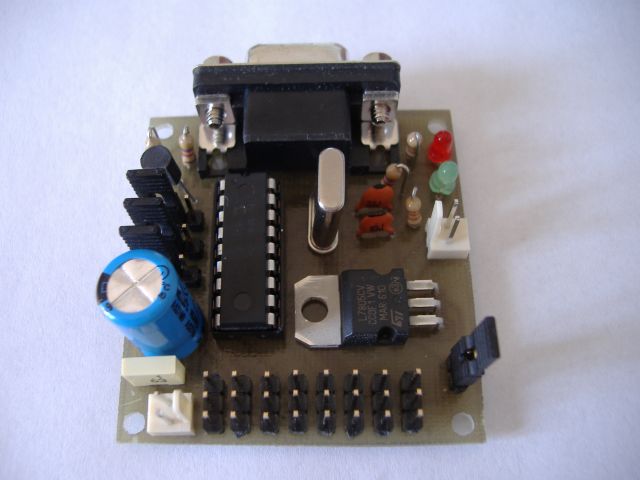
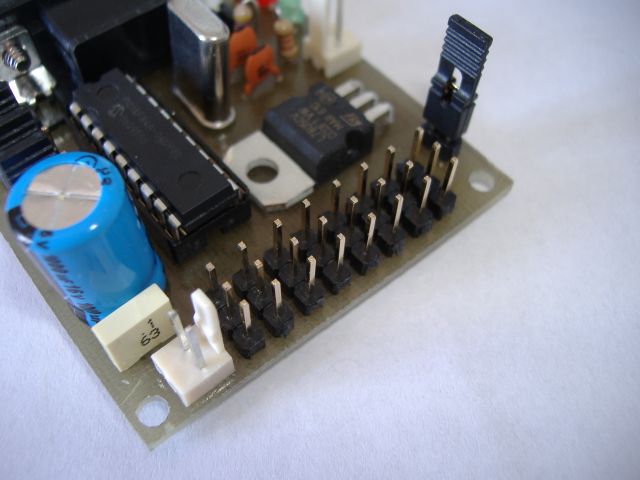
Alcune fasi del montaggio del prototipo
|
|
|
||
Dettagli della scheda
|
|
|
|
|
|
Impostazione indirizzo scheda
 Dettaglio jumper per la configurazione della scheda con indirizzo da 0 a 7, vedere tabella |
|
Servomotore utilizzato per il collaudo
 |
|
|||||||||||||||||||||||||||||
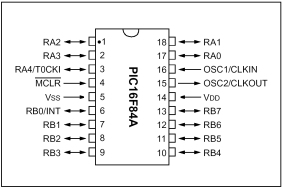
| Processore PIC 16F84A | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| LM 7805 Regolatore di tensione | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
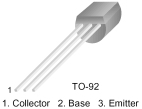
| Transistor BC547 (NPN Switching and Applications) | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor |
|
|
La versione originale è in lingua francese |
|---|
| Elenco revisioni | |
| 13/04/2012 | Aggiornato pagina |
| 14/01/2008 | Aggiornato pagina, inserito possibilità di scaricamento documentazione |
| 17/04/2007 | Aggiornato foto prototipo di Lorenzo Pettenatti |
| 27/03/2007 | Emissione preliminare |