Collegamento del sensore
alla scheda con BS2 SX
Ultimo aggiornamento 13 settembre 2015
|
Collegamento del sensore alla scheda con BS2 SX Ultimo aggiornamento 13 settembre 2015 |
|
|
|
|
|
Sulla rivista
n° 298/299
di Fare Elettronica in edicola nel mese di Aprile
2010 è pubblicato un mio articolo dal titolo
Radio modem e Sensore Radar,
in cui viene trattato l'utilizzo del sensore di tipo
sonar
EZ1 prodotto dalla MaxSonar.
Vengono illustrati il loro funzionamento in rapporto alla
scheda con processore Basic Stamp 2 SX
e
Cubloc CB220.
|

Collegamento del sensore alla scheda con BS2 SX
| Per provare il sensore con la scheda basata sul
BS2 SX Parallax, si utilizzerà l’uscita del
sensore EZ1 PW che fornisce in uscita un impulso la cui larghezza
rappresenta la distanza. Il fattore di scala è pari a 147µs per pollice
(25,4mm). Per il collegamento si farà riferimento allo schema di collegamento utilizzando il connettore X4. Sono necessari tre cavi: Alimentazione, massa, e ingresso impulsi PWM, porta P0 del processore.
|
|
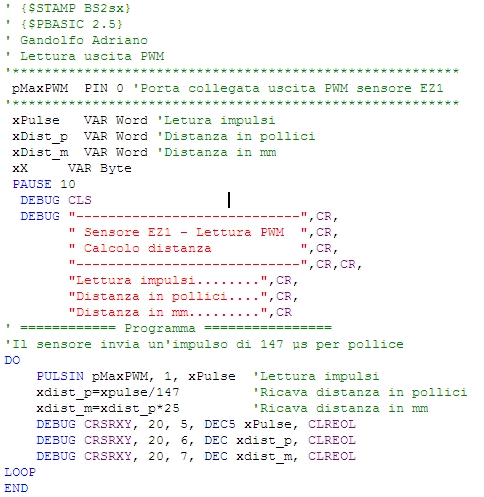
| Utilizzando il Basic
Stamp Editor si caricherà in memoria del processore il programma EZ1_PWM.bsx. Quando sarà in esecuzione nella finestra di DEBUG, verranno mostrati gli impulsi letti, la distanza in pollice e quella in mm rilevata dal sensore.
Collegamento del sensore EZ1 alla scheda BS2 SX |
|
 |
 |
Nuova versione ad opera di Alex Conti
L'amico Alex Conti ha modificato il programma di utilizzo del sensore EZ1 per renderlo più preciso, il sensore è stato utilizzato sul robot Panettone, dotato d una scheda Scheda DeA BASIC Stamp® in cui è stato sostituito il processore, utilizzando un BS2 SX.
 Scheda DeA BASIC Stamp® Board con BS2 |
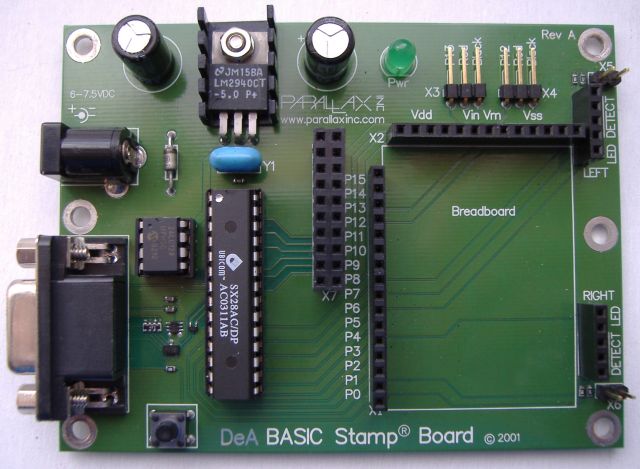 Scheda DeA BASIC Stamp® Board con BS2 SX |
In questa nuova versione del
programma il valore in entrata (PULSIN) viene moltiplicato per 0.8 in modo da
ottenere un valore più veritiero.
Questo viene fatto dividendo per 5 e moltiplicando per 4, il valore della
distanza in pollici è calcolato utilizzando come valore di conversione
1"=25.4mm.
Utilizzando la stessa tecnica è stato sommato alla parte intera e alla parte decimale
per ottenere un valore più veritiero (x*25+x*2/5) per correggere l'errore
sistematico che porta ad una sovrastima della distanza di circa il 3.49%, per
questo motivo i risultati ottenuti sono stati riscalati aggiungendo il 3.5% degli stessi (3.5% di x =
x*3/100+x*5/1000)
Nel programma sono state usate molte variabili temporanee, che sono mostrate a
video per la verifica delle stime effettuate.
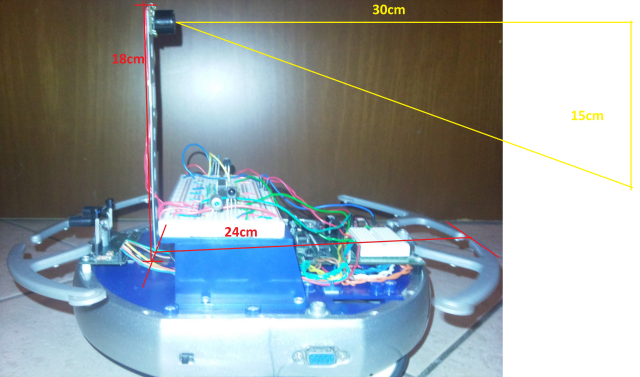
Dal punto di vista hardware il consiglio di Alex è di montare il sensore nella
parte posteriore del robot (nell'ottica di una visione frontale) altrimenti,
dato il limite minimo di 15.2cm, risulta poco utile. In più ha un cono di raggio
15cm ad una distanza di 30cm, quindi consiglio di montarlo in una posizione
rialzata, per evitare che il corpo del robot interferisca nelle rilevazioni
| Elenco revisioni | |
| 13/09/2015 | Inserito nuova versione programma realizzato da Alex Conti |
| 02/02/2013 | Aggiornato pagina |
| 09/03/2010 | Emissione preliminare |