![]()
ultimo aggiornamento 14 aprile 2012
|
ultimo aggiornamento 14 aprile 2012 |
|
|
|
Costruzione di una CNC (di Luca Giangravè lucarobot@hotmail.it )
Cari amici oggi vi presento una
mia nuova creazione: una
CNC
(Computer Numerical Control
in inglese) 3 assi.
Questo progetto è nato durante le vacanze scolastiche di Pasqua 2010 ed è stato
reso operativo solo dopo un anno e ½ …… vi chiederete caspita allora è un
progetto complesso!?….NO è solo che i pezzi per realizzarlo costano soldi e ho
dovuto comprare il materiale a rate; senza contare che, oltre a questo progetto,
avevo l’impegno della scuola e degli allenamenti ……
Ma passiamo dai dettagli tecnici … Innanzitutto diciamo che prima della
realizzazione la macchina è stata studiata, grazie alla potenza del CAD, tramite
disegni 3D e 2D
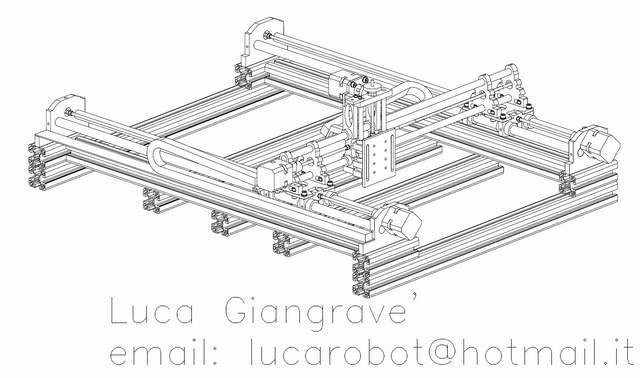

Inizialmente avevo anche
sviluppato un banale programma, realizzato con il Basic integrato nel CAD, che simulasse il
funzionamento della macchina ma poi ho lasciato perdere …..
L’ingombro della macchina è di circa 800x600x250 mm con un’area di lavoro di
700x500x80 mm.
L’intera macchina è posizionata su un banco creato con profili di alluminio
40x40mm,imbullonati tra loro, che permettono sia di ancorare i pezzi durante la
lavorazione sia di rendere lo spostamento della macchina più agevole e sicuro.
Passiamo ora alla struttura vera e propria della macchina: essa e stata
realizzata con alluminio da 10mm e da 5mm eccetto gli alberi che sono in acciaio
comprati sul sito delle
RS Componets
![]()
Tutti i pezzi sono stati prima
disegnati al CAD e poi tagliati all’acqua, utilizzando una
waterjet,
nell’officina di un mio amico; i pezzi poi sono stati
verniciati per una questione puramente estetica.
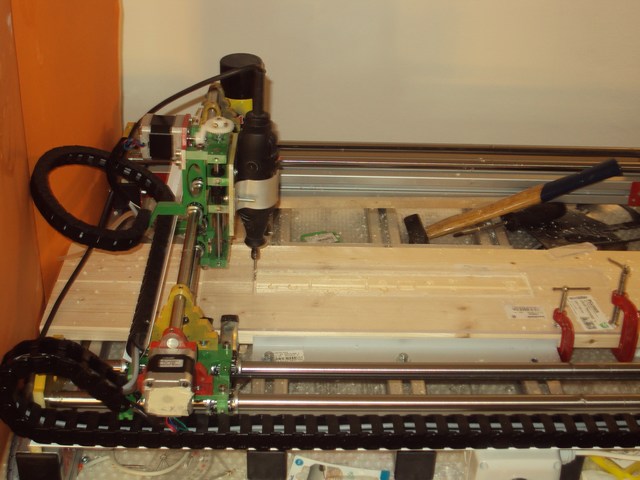
I suoi 3 assi sono azionati da 4 motori passo-passo (NEMA-17 Bipolar) suddivisi
in 2 motori per il primo asse e 1 per i restanti due.
 |
 |
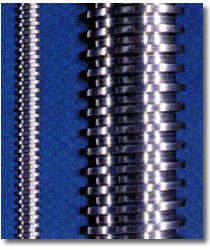
La trasmissione è a carico di una
normale barra filettata Ø5mm che garantisce una precisione molto accurata nel
posizionamento dell’asse ma che rende il movimento molto lento; cosa antipatica
durante le operazioni di posizionamento della macchina sul pezzo o quando è
necessario percorrere lunghi tratti a mandrino spento.
Questi inconvenienti sono giustificabili dal fatto che una barra filettata di
questo tipo costa nulla rispetto a queste chiocciole con filettatura
trapezoidale a norme iso visibile
in foto.
Sulla testa del 3° asse è montato il mandrino tipo dremel che grazie alla varietà di utensili supportati permette di realizzare quasi tutte le lavorazioni di cui un robot taro ha bisogno. La precisione della macchina è di +-0.05mm.

Dopo questa breve presentazione
della meccanica passiamo ora alla parte relativa al software/hardware.
Tutte le
schede, che non ho comprato, sono state disegnate con l’aiuto di
Eagle e
sono state poi realizzate nella cantina di mia nonna dove ho allestito un
“piccolo laboratorio chimico” comprendente del necessario per effettuare
fotoincisione e sviluppo dei circuiti.
Tra le varie schede che compongono la “logica” della macchina troviamo ben due
Arduino nano,
entrambi connessi al computer; la prima ha lo scopo di gestire le schede dei motori con
i relativi controlli (motore connesso; scheda funzionante; alimentazione
mancante ecc…) mentre l’altra gestisce l’uscita a 220V per il mandrino, i funghi
di emergenza e altre piccole cosette per evitare di farsi del male.
|
|
|||
Tutta la parte hardware è
contenuta in 2 contenitori plastici.
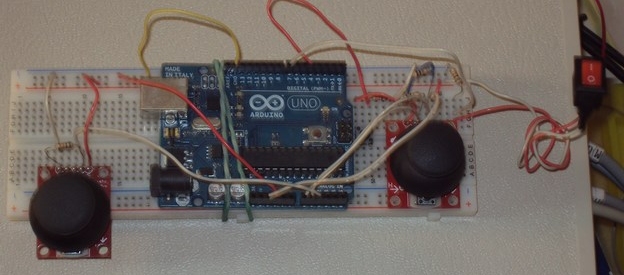
Infine per muovere la macchina manualmente ho creato una scheda,basata
su Arduino
UNO, che monta 2 joystick analogici per i due assi, un interruttore di
attivazione comandi e il pulsante uomo-morto.
Detto ciò parliamo a grandi linee del programma ….
Il primo compito che il programma è chiamato a svolgere è la connessione ai 3
Arduino fatta in modo automatica seguendo un banale protocollo che prevede lo
scambio di codici identificativi in modo che il programma possa riconoscere il
dispositivo col quale sta dialogando.
Una volta che la connessione tra HW e SW è completata la grafica del programma
mostra lo stato delle singole schede (motori connessi, scheda attiva ecc..). in
caso di mal funzionamento anche di una sola scheda il programma entra in
emergenza e disattiva all’istante l’alimentazione alla parte di potenza dei
motori e del mandrino cosi ma rendere la macchina sicura e ferma.
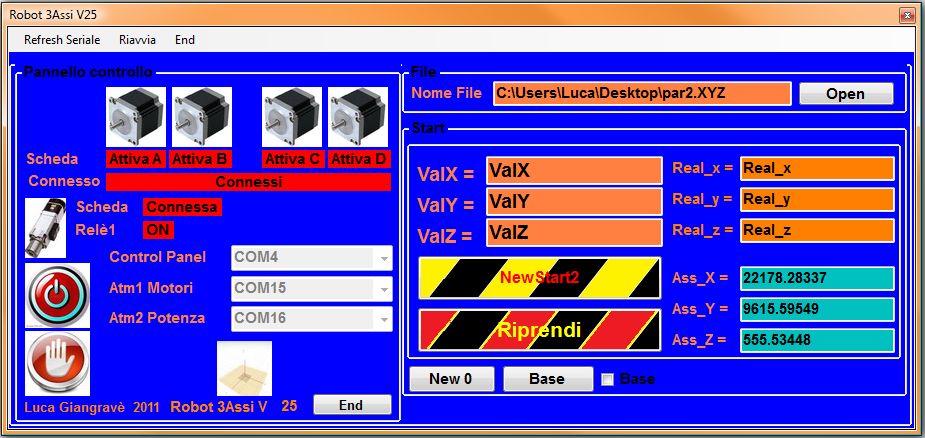
A questo punto se tutto funziona correttamente siamo pronti per caricare il
programma *.xyz ; questa operazione si esegue cliccando su “Open” e scegliendo
il file da eseguire. Infine si clicca su “NewStart2” e la macchina parte.
Per chiarire ….
Il file *.xyz è un file generato da un mio programma che converte in linguaggio
macchina un file di AutoCad. Questo file è composto da tutte le istruzioni che
la macchina deve compiere per riprodurre il pezzo desiderato.
Come si vede in foto la grafica del programma comprende altre icone, tasti e
campi di testo ma preferisco sorvolare sulla loro funzione.
Nonostante la macchina abbia già lavorato alla realizzazione di pezzi l’ intero
progetto è ancora oggi in fase di sviluppo e miglioria mentre delle parti ,come
il comando manuale, sono ancora da completare …. il tutto rimandato a quando
avrò del tempo libero …
Ed ora eccovi alcune foto prese alla fine di una lavorazione.
Foto con prove di taglio su balsa fatte durante la fase di test del programma
|
|
|
|
|
|
|
|
| Elenco revisioni | |
| 14/04/2012 | Emissione preliminare |