Progetto GORT
SCHEDA DI COMANDO RADIOCOMANDATA
PROGETTO ORIGINALE NUOVA ELETTRONICA
TRASMETTITORE LX858
RICEVITORE LX859
ultimo aggiornamento della pagina il 09/03/2006
|
|
Progetto GORT TRASMETTITORE LX858 ultimo aggiornamento della pagina il 09/03/2006 |
|
|
|
Premetto che il circuito non è opera mia ma è stato realizzato dalla rivista Nuova Elettronica e pubblicato sulla suddetta rivista nel numero 120 (dicembre 1987), sfortunatamente tale KIT non viene più prodotto, chi fosse interessato posso sempre mandare, tramite e-mail copia della rivista.
 Trasmettitore e ricevitore |
 Circuito ricevitore |
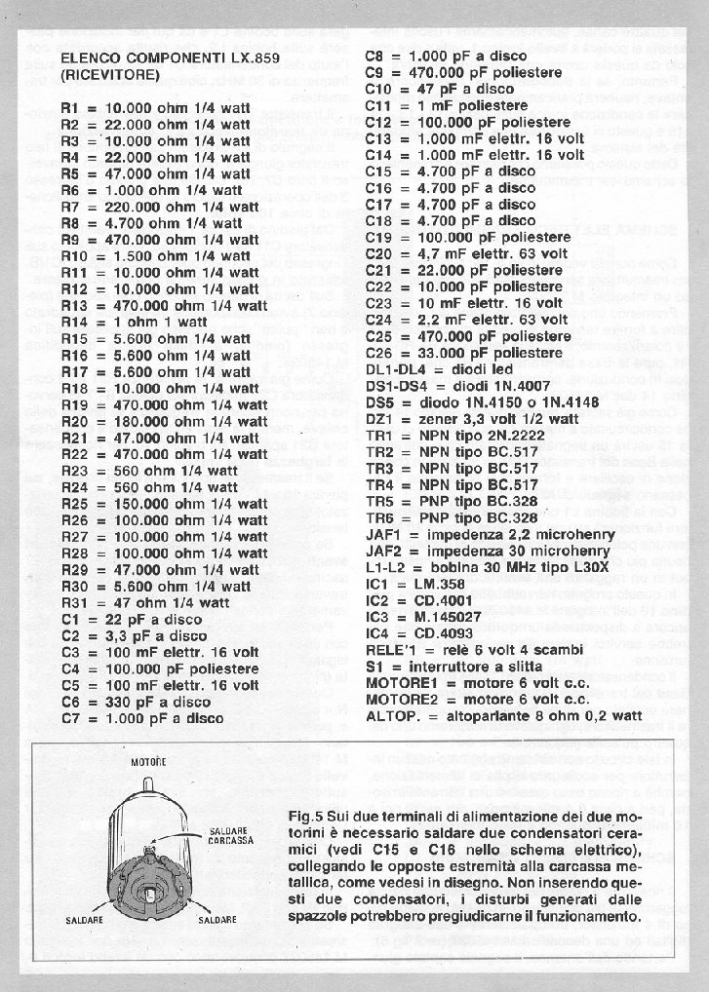 Elenco componenti |
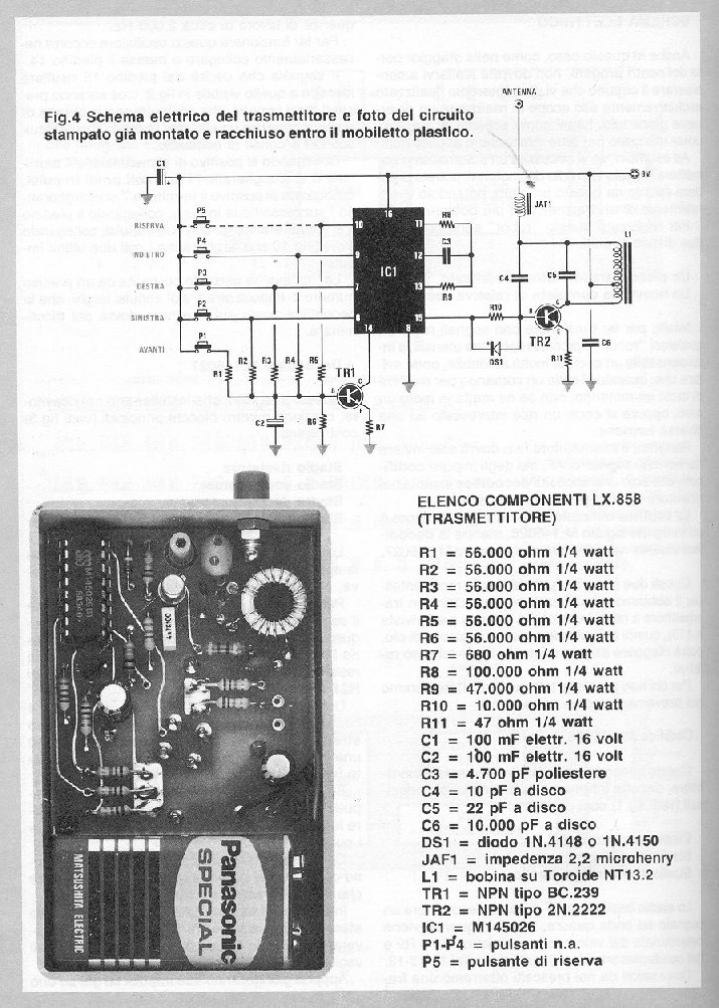 Circuito trasmettitore |
 |
|
|
E' possibile scaricare il testo completo dell'articolo in formato PDF (dimensioni file 4,8 Mb) |

SCHEMA
ELETTRICO TRASMETTITORE
Come potrete nello
schema, per realizzare questo trasmettitore sono
necessari due soli transistor ed un integrato
MC145026 prodotti
dalla MOTOROLA.
Premendo uno dei quattro pulsanti di comando, oltre a fornire tensione ai
piedini di codifica 6 - 7 - 9 polarizzeremo, tramite le resistenze R1-R2-R3- R4, pure la
Base del transistor TR1 che, portandosi in conduzione, cortocircuiterà a massa il piedino
14 dell'M.145026.
Quando questo piedino 14 viene cortocircuitato a massa,
dal suo piedino di uscita 15 uscirà un segnale codificato che, entrando nella Base del
transistor TR2, lo metterà in condizione di oscillare e fornire così all'antenna il
necessario segnale di AF.
Con la bobina L 1 che costruiremo, il trasmettitore funzionerà su una
frequenza di circa 30 MHz, con una potenza di qualche decina di mW, che risulta
più che sufficiente per pilotare il nostro robot in un raggio di una ventina di metri
circa.
In questo progetto non abbiamo utilizzato il piedino 10 dell'integrato
MC145026, pertanto avremo ancora a disposizione un quinto canale che potrebbe servirci in
seguito per un'altra specifica funzione.
Il condensatore elettrolitico C2 che troviamo sulla Base del transistor TR1,
ci permetterà di mantenere eccitato per qualche secondo supplementare il trasmettitore,
ogniqualvolta lasceremo uno dei quattro pulsanti di comando.
In tale circuito non abbiamo aggiunto nessun interruttore per scollegare la
pila di alimentazione, perché a riposo esso assorbe una corrente irrisoria, pari a circa
0,1 uA, per salire poi a 10 mA quando questo trasmetterà.
SCHEMA ELETTRICO RICEVITORE
Lo schema del
ricevitore a differenza del trasmettitore risulta leggermente più complesso, in quanto
richiede l'uso di 4 transistor, un operazionale, due integrati digitali ed una decodifica
MC145027.
Partendo dall'antenna,
il segnale captato giungerà sulla bobina L1 e da qui per induzione passerà sulla bobina
L2, che risulta accordata con l'aiuto del condensatore C1 da 22 pF sulla frequenza
di 30 MHz, cioè quella utilizzata per trasmettere.
Il transistor TR1 collegato a tale bobina funziona da ricevitore/rivelatore in
superreazione. Il segnale di BF presente sull'Emettitore di tale
transistor giungerà, dopo essere passato attraverso il filtro C7, R5, CB, C9, sul piedino
d'ingresso 3 dell'operazionale siglato IC1/A, che lo amplificherà di circa 100 volte.
Dal piedino di uscita 1 il segnale, tramite il condensatore C11 da 1
uF,
verrà applicato sull'ingresso del secondo operazionale siglato IC1/B, utilizzato in
questo schema come squadratore.
Sull'uscita di questo secondo operazionale (piedino 7) avremo disponibile un
segnale squadrato e ben "pulito", che potremo già applicare sull'ingresso
(piedino 9) della nostra decodifica MC145027.
Come già saprete, la resistenza R21 ed il condensatore C22 applicati sui piedini 6
- 7 ci servono per riconoscere la frequenza di lavoro della chiave, mentre la resistenza
R20 ed il condensatore C21 applicati sul piedino 10, per riconoscere la larghezza degli
impulsi.
Se il trasmettitore non invierà alcun segnale, sui piedini 15 - 14 - 13 (il
piedino 12 non viene utilizzato) sarà presente una condizione logica 0, cioè tensione
zero.
Se premeremo sul trasmettitore il tasto motori avanti, solo dal piedino 11
dell'integrato MC145027 usciranno degli impulsi positivi che, passando attraverso il diodo
OS5, andranno a caricare positivamente il condensatore elettrolitico C23.
Pertanto, su tale condensatore ci ritroveremo con un livello logico 1 e poiché ad
esso risulta collegato il Nand 1C4/A come inverter, sulla sua uscita (piedino 10) ci
ritroveremo un livello logico 0.
Questo livello logico 0 entrerà nell'ingresso del Nor siglato IC2/C e in quelli
siglati IC2/B e IC2/A e, poiché gli ingressi di questi ultimi due Nor risultano collegati
ai piedini 15 - 14 dell'integrato MC145027 (piedini che si trovano attualmente a livello
logico 0), sulle loro uscite (piedini 10, 11) risulterà presente un livello logico 1, che
utilizzeremo per pilotare le Basi dei due transistor Darlington siglati TR2 e TR3.
Così facendo sui Collettori di questi due transistor ci ritroveremo un livello
logico O, vale a dire terminali cortocircuitati a massa.
In tale condizione si metterà in moto sia il motorino N1 che il N2, facendo
avanzare il nostro robot.
Se premeremo il tasto svolta a sinistra del trasmettitore, solo sul piedino 15
dell'integrato MC145027 ci ritroveremo con un livello logico 0, quindi sull'uscita del Nor
IC2/A si presenterà un livello logico 0.
Non risultando più polarizzata la Base del transistor TR2, il motorino N1 si
fermerà e, poiché il secondo motorino N2 continuerà a ruotare, il robot girerà verso
sinistra.
Premendo il tasto svolta a destra ci ritroveremo invece con un livello logico 1 sul
piedino 14 ed in questo caso sarà l'uscita del Nor IC2/B che si porterà a livello logico
0.
Non risultando più polarizzata la Base del transistor TR3, il motorino N2 si
fermerà e, poiché il primo motorino N1 continuerà a ruotare, il robot girerà verso
destra.
Premendo il tasto marcia indietro ci ritroveremo con un livello logico 1 sul
piedino 13, che, raggiungendo la Base del transistor TR410 porterà in conduzione facendo
così eccitare il relé.
Questo invertirà l'alimentazione sugli ingressi dei due motorini, facendo così
muovere il robot all'indietro.
Nel trasmettitore rimane un tasto di riserva che potremo collegare nel
trasmettitore sul piedino 10 dell'integrato MC145026.
Premendo questo tasto supplementare, avremo una condizione logica 1 sul piedino 12
dell'integrato MC145027 e qui potremo collegare un transistor per pilotare un
secondo relé (schema identico a quello collegato al piedino 13) che, a sua volta, potrà
mettere in moto un registratore, oppure un lampeggiatore, ecc.
Premendo uno dei quattro pulsanti del trasmettitore, il robot emetterà subito un
suono facendo contemporaneamente lampeggiare i due led applicati sugli occhi del robot ed
eventualmente altri due fissati in corrispondenza delle orecchie o di altre parti del
corpo.
Per ottenere queste due funzioni supplementari sfrutteremo il Nor siglato IC2/C, i
Nand siglati IC4/B - 1C4/C - IC4/0 e i due transistor TR5 e TR6.
Tutto il circuito funziona con quattro pile a torcia da 1,5 volt che, collegate in
serie, ci permetteranno di ottenere una tensione di 6 volt.
Facciamo presente che a riposo il circuito assorbe solo 5 mA, ma questo
assorbimento salirà fino a raggiungere i 300 mA, quando i due motorini sono in
moto, quindi usandolo in continuità e per molto tempo l'autonomia delle pile non
risulterà elevata.
Aggiungeremo ancora, perché non lo si possa considerare un difetto, che una volta
premuto il pulsante avanti, anche se lo rilasceremo subito, il robot continuerà a
muoversi ancora per 8 . 10 secondi.
Questo tempo viene determinato dal condensatore elettrolitico C23 collegato subito
dopo il diodo DS5.
Modificando la capacità di tale condensatore si potrà aumentare o ridurre questo
tempo.
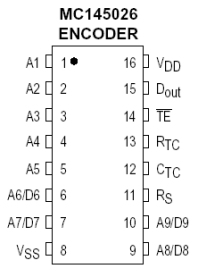 Piedinatura dell'integrato encoder |
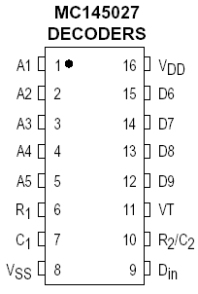 Piedinatura dell'integrato decoder |
 Schema a blocchi circuito encoder |
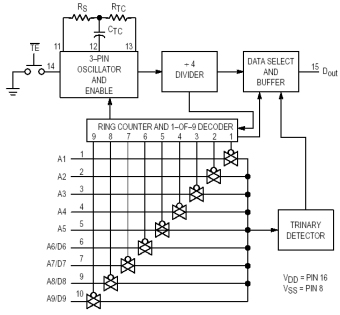
 Schema a blocchi circuito decoder |
| Elenco revisioni documento: | |
| 09/03/2006 | Inserito link per scaricate testo completo della rivista |
| 15/09/2005 | Prima emissione pagina |


