ultimo aggiornamento 4 maggio 2010
|
|
ultimo aggiornamento 4 maggio 2010 |
|
|
|
A questo punto, dopo aver ricontrollato la scheda
per verificare che non ci siano eventuali cortocircuiti tra le piste, si può
procedere al collaudo.
Per provare la scheda si dovrà scaricare (se non è già disponibile) il programma
BASIC Stamp disponibile ora nella versione 2.4.

Il programma potrà essere scaricato gratuitamente dal sito della Parallax e si
dovrà installare seguendo le istruzioni che man mano appariranno sul video.
Si collegherà quindi la scheda al computer tramite un cavo RS232 connesso al
connettore X1, e si alimenterà la scheda utilizzando un qualunque alimentatore
stabilizzato connesso alla presa VAL1.
L’alimentatore, dovrà fornire una tensione compresa tra 6 e 9 V, ricordando che
la presa polarizzata deve avere il positivo interno e il negativo esterno.
 |
 |
Cavo seriale ed alimentatore
Se nel vostro computer non fosse disponibile una porta seriale, potrà essere
utilizzato un’apposito adattatore USB-Seriale.

Spostando l’interruttore a slitta SW1 si dovrà
accendere il led verde D4 che segnala la presenza della tensione
d’alimentazione, mentre il led D2 dovrà rimanere spento.
Collaudo della comunicazione.
L’ Editor del BASIC Stamp ha un’opzione per
assicurarsi che il vostro PC o laptop possa comunicare con il processore.
Caricare il programma con un doppio-click sull’icona dell’Editor del BASIC Stamp
sul desktop del vostro computer che dovrebbe apparire simile a quella della
figura sotto.

Icona del programma PBasic
La finestra dell’Editor del BASIC Stamp deve essere similare a quella mostrata
Per assicurarsi che il processore sta comunicando con il computer, clickare il
menù Run, quindi selezionare Identify opure premendo CTRL+I
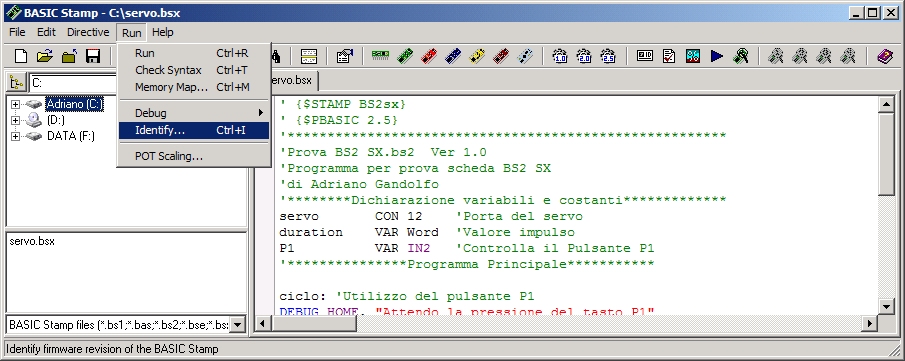
Schermata del programma PBasic
Si aprirà una finestra e in contemporanea si accenderanno alternativamente il
led D2 rosso/verde segno d’attività sulla linea seriale.
Se tutto funziona, in corrispondenza della porta seriale cui è collegato il cavo
dovrebbe apparire la scritta BASIC Stamp 2sx
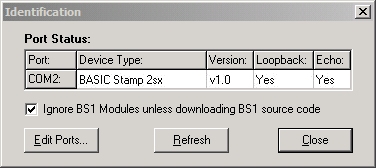
Processore riconosciuto
Assicuratevi che il cavo seriale sia un cavo seriale DIRETTO. NON USATE UN CAVO
SERIALE NULL MODEM
Programma di prova.
Per provare alcune funzioni della scheda si potrà utilizzare il programma il cui
listato è riportato sotto.
Questo permette di verificare la funzionalità del tasto P1 e di una delle uscite
per servomotore. Alla scheda dovremmo quindi collegare un servomotore al
connettore X2.
Una volta digitato il programma, lo si trasferirà all’interno del processore
mediante l’apposito editor, ci verrà richiesto di premere il tasto presente
sulla scheda, a questo punto si assisterà alla rotazione automatica
dell’alberino del servomotore.
| ' {$STAMP BS2sx} ' {$PBASIC 2.5} '******************************************************* 'Prova BS2 SX.bs2 Ver 1.0 'Programma per prova scheda BS2 SX 'di Adriano Gandolfo '********Dichiarazione variabili e costanti************* servo CON 12 'Porta del servo duration VAR Word 'Valore impulso P1 VAR IN2 'Controlla il Pulsante P1 '***************Programma Principale*********** ciclo: 'Utilizzo del pulsante P1 DEBUG HOME, "Attendo la pressione del tasto P1" IF P1= 0 THEN programma GOTO ciclo: Programma: DEBUG CLS,HOME, "Ora farò ruotare il servomotore" FOR duration= 1250 TO 2500 STEP 20 PULSOUT servo, duration PAUSE 20 NEXT FOR duration= 2500 TO 1250 STEP 20 PULSOUT servo, duration PAUSE 20 NEXT DEBUG CLS,HOME, "Fine programma !" END |
Comandare un servomotore.
Per far ruotare il perno di un servomotore, occorre fornire al circuito interno
di comando, degli impulsi di una certa durata. A seconda del valore, il perno
ruoterà in senso orario o antiorario oppure si porterà in posizione centrale.
Generalmente con un impulso di durata pari a 1.5ms, il perno del servomotore si
posiziona esattamente al centro del suo intervallo di rotazione. Da questo punto
il perno può ruotare fino a -90 gradi (senso antiorario) se l'impulso fornito ha
una durata inferiore a 1.5ms e fino +90 gradi (senso orario) se l'impulso
fornito ha durata superiore a 1.5ms. Il rapporto esatto tra la rotazione del
perno e la larghezza dell'impulso fornito può variare tra i vari modelli di
servo.
Se questi valori sono ripetuti con un’intervallo non superiore a 20 ms la
posizione raggiunta sarà mantenuta.
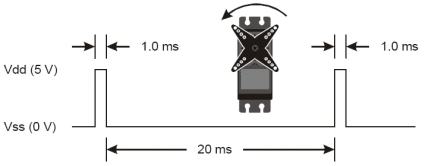
Diagramma temporizzazione per rotazione antioraria
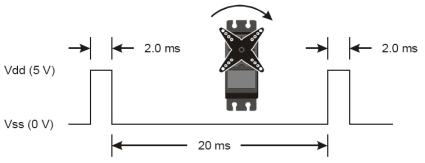
Diagramma temporizzazione per rotazione oraria
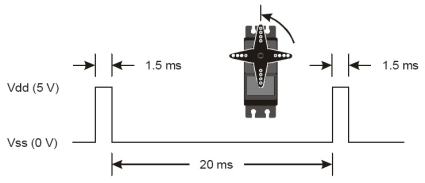
Diagramma temporizzazione per posizionamento al centro
Nel listato per muovere il servomotore è utilizzata l’istruzione PULSOUT con la
sintassi
PULSOUT Pin, Duration
Dove Pin è la porta a cui è collegato il servo,
mentre Duration è il numero di impulsi che il processore deve inviare.
Dato che il singolo impulso per il processore BS2 SX vale 0.8 µs occorre
calcolare il valore di duration con la formula
Duration= numero di ms x 1250:
| Rotazione antioraria | Posizione centrale | RotazioneOraria |
| 1250 | 1875 | 2500 |
Per mantenere il servo nella posizione occorre ripetere il comando ogni 20 ms.
| Elenco revisioni | |
| 04/05/2010 | Emissione preliminare |

