ultimo aggiornamento 4 maggio 2010
|
|
ultimo aggiornamento 4 maggio 2010 |
|
|
|
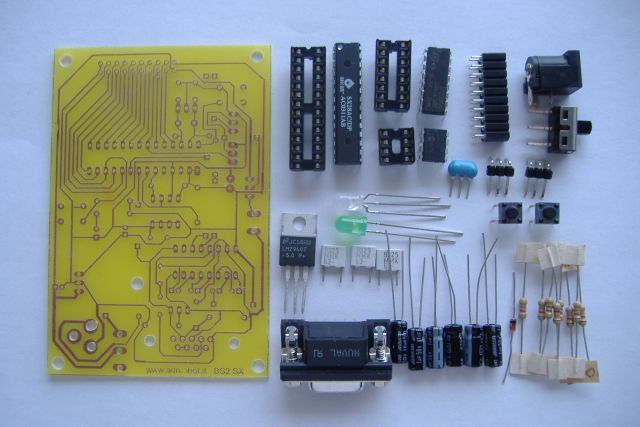
I principali componenti utilizzati sono
il Processore,
la memoria da 128K, e il
risuonatore Ceramico Murata in
DIP da 50 MHz.
Il materiale può essere acquistato tramite internet
sul sito della
Essegi Elettronica srl
www.homotix.com.
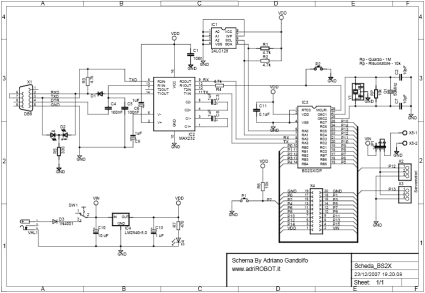
Schema elettrico
Passiamo ora, ad esaminare lo schema elettrico, visibile sotto, esso può essere
suddiviso in più sezioni.
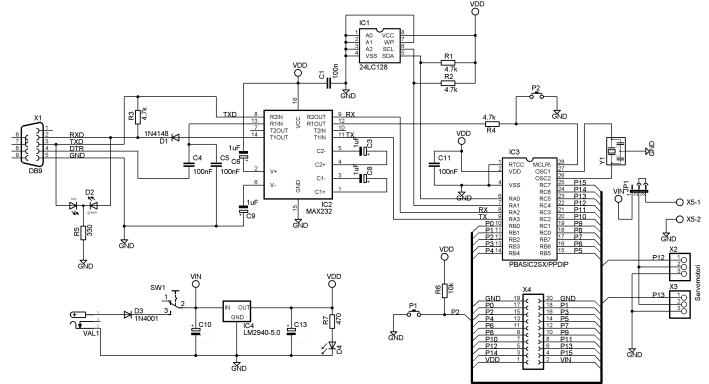

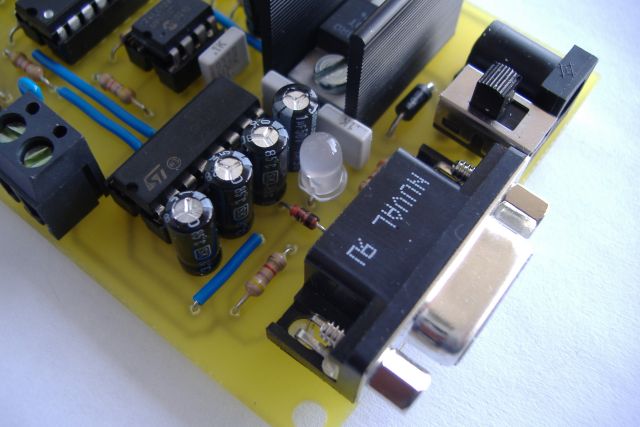
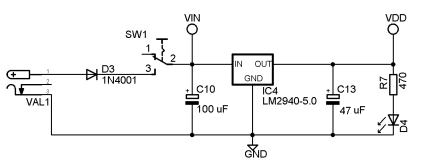
Sezione alimentatrice
La scheda lavora con un'unica tensione
d’alimentazione di 5 Vcc. Questa è ottenuta riducendo la tensione d'ingresso in
arrivo dalla presa polarizzata VAL1 (La tensione deve essere continua con un
valore compreso tra 6 e 8V) mediante regolatore IC4 un LM2940-5,0. Il
diodo led D4 monitorizza la tensione di lavoro ottenuta. Il diodo D3 tipo
1N4001 serve per
evitare eventuali inversioni di polarità dell'alimentazione che può essere
sconnessa tramite l'azionamento dell'interruttore a slitta SW1.
| LM2940 1A Low Dropout Regulator | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| Diodo 1N4001 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
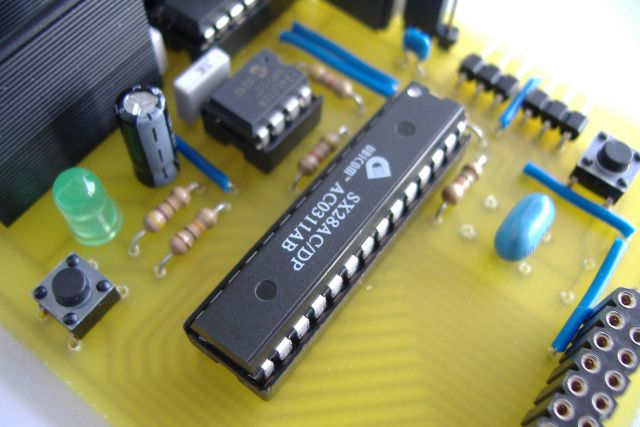
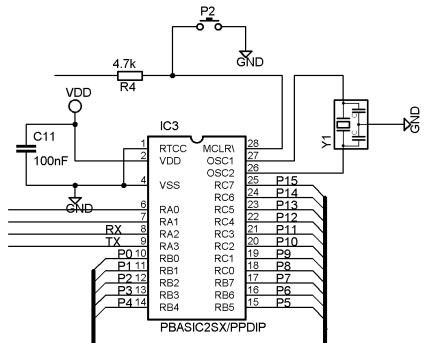
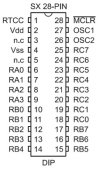
Processore
Il processore IC3 è, come abbiamo già detto, uno
SX28AC/DP ora
prodotto da Parallax (precedentemente SCENIX / Ubicom) in cui è stato integrato l'interprete del
linguaggio PBASIC.
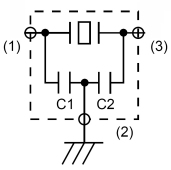
Il clock è rappresentato da un risuonatore ceramico da 50 MHz connesso ai
piedini 26 e 27.
L’alimentazione è poi fornita ai piedini 2 (VDD) e 4 (VSS). Il processore
fornisce 16 ingressi/uscite (Da P0 a P15) connesse ai piedini delle porte da RB0
a RB7 e da RC0 a RC7.
| Processore SX28 con EE/Flash Program Memory | ||
 |
DESCRIZIONE:Chip Interprete in DIP per BS2 SX |
 |
| Piedinatura | Datasheet | Foto |
| Risuonatore ceramico 50 MHz | ||
 |
CODICE Homotix:
250-05060 |
 |
| Piedinatura | Datasheet | Foto |
Interfaccia seriale
Questa sezione (figura 5) si occupa di interfacciare il processore con il PC.
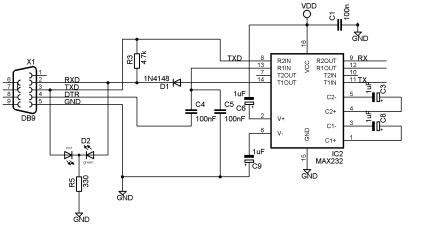
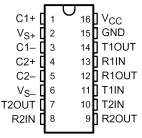
E’ basata su l’integrato IC2 (vedere figura 6), un MAX232, questo circuito, ad
alimentazione unica e con pochi componenti esterni, è in grado di ottenere
livelli RS232 di ± 12 V a partire da livello logico TTL e viceversa.
Il connettore di comunicazione X1 consiste in un connettore DB9 femmina a 9 pin
che si collega direttamente alla porta seriale dei PC mediante il corrispondente
cavo.
Sul suo piedino 3 (TXD) si ricevono i dati che trasmette il PC.
Questi sono convertiti a livelli TTL e si applicano al processore tramite il
piedino RA2/RX.
Il processore trasmette dati tramite il piedino RA3/TX che, convertiti a livello
RS232, arrivano al PC tramite il piedino 2 (RXD) dei connettore X1.
Esiste poi un collegamento tra il piedino 4 di X1 DTR con il piedino MCLR del
processore, tale linea se collegata a massa con il pulsante P2, provoca il reset
del processore.
I diodi presenti all’interno di D2 si illuminano mostrando attività sul canale
seriale sia durante la trasmissione sia durante la ricezione dei dati.
| MAX232 DUAL EIA-232 DRIVERS/RECEIVERS | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| Diodo 1N4148 | ||
|
|
|
 |
| Piedinatura | Datasheet | Foto |
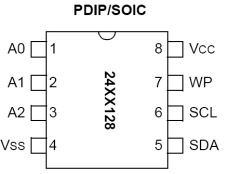
Memoria
La sezione memoria è formata dall’integrato IC1 che è una memoria 24LC128 da 128Kb connessa tramite un collegamento I2C al processore.
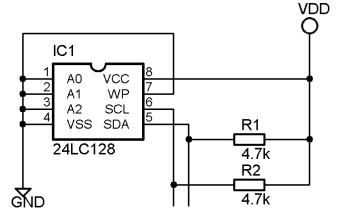
Il bus I2C acronimo di Inter
Integrated Circuit (pronuncia i-quadro-ci o i-due-ci), è un sistema di
comunicazione seriale bifilare utilizzato tra circuiti integrati, ideato dalla Philips.
Il protocollo hardware dell'I2C richiede due linee seriali di
comunicazione:
SDA (Serial DAta line) per i dati, di tipo bidirezionale,
SCL (Serial Clock Line) per il clock, serve cper
sincronizzare la comunicazione che in questo caso è di tipo unidirezionale, per
la presenza di questo segnale l'I2C è un bus sincrono
Va aggiunta una connessione di riferimento detta, talvolta impropriamente, GND e
una linea di alimentazione Vdd a cui sono connessi i resistori di pull-up ( R1 e
R2) che può anche non essere condivisa da tutti i dispositivi (le tensioni
tipiche usate sono +5 V o +3,3 V anche se sono ammesse tensioni più basse o più
alte
Nel nostro schema la linea SDA è connessa alla porta RA0 mentre la linea SCL è
connessa alla porta RA1
| Memoria 128K I2C™ CMOS Serial EEPROM | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
Piedinatura della memoria 24LC128.
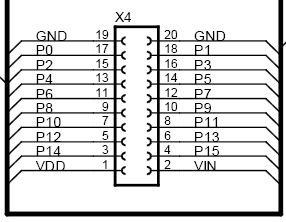
Connettore d’uscita.
Sul connettore d’uscita X4 (figura 8) sono disponibili le 16 porte d’ingresso/uscita, la tensione d’ingresso (Vin), la tensione di alimentazione stabilizzata (Vdd) e la massa.
|
 |
||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 |
Ad esso potranno essere collegate altre schede come per esempio: una per pilotare motori DC, collegamento di sensori, schede di potenza ed altro ancora.
Connettori per collegamento servomotori.
Sulla scheda sono presenti due connettori (figura 9) già connessi alle porte P12 e P13 del processore.
Questi possono servire per il collegamento di
servomotori (Tabella A), la fonte d’alimentazione può essere fornita tramite la
tensione (Vin) oppure tramite un’apposita fonte d energia collegata alla
morsettiera X5
Questa può essere scelta spostando il Jumper JP1.
Segnali su connettori X2 e X3.
| 1 | Segnale (P12 e P13) |
| 2 | Alimentazione |
| 3 | GND |
Morsettiera X5
| 1 | Positivo alimentazione |
| 2 | GND |
Pulsante di servizio.
Sulla scheda è presente un pulsante P1 con relativa resistenza di pull-up connesso alla posta P2 (RB2) che potrà essere utilizzato per esempio per lo start di un programma.
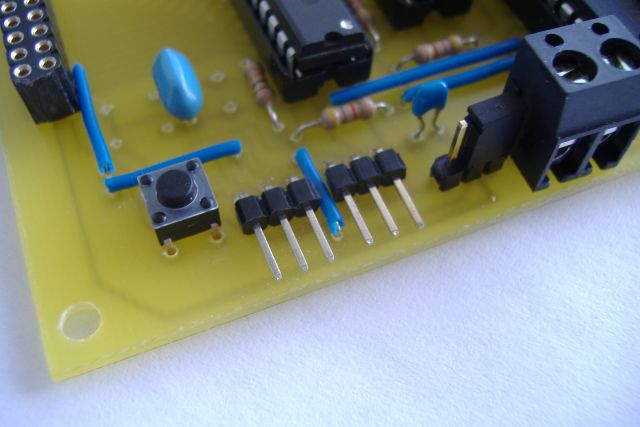
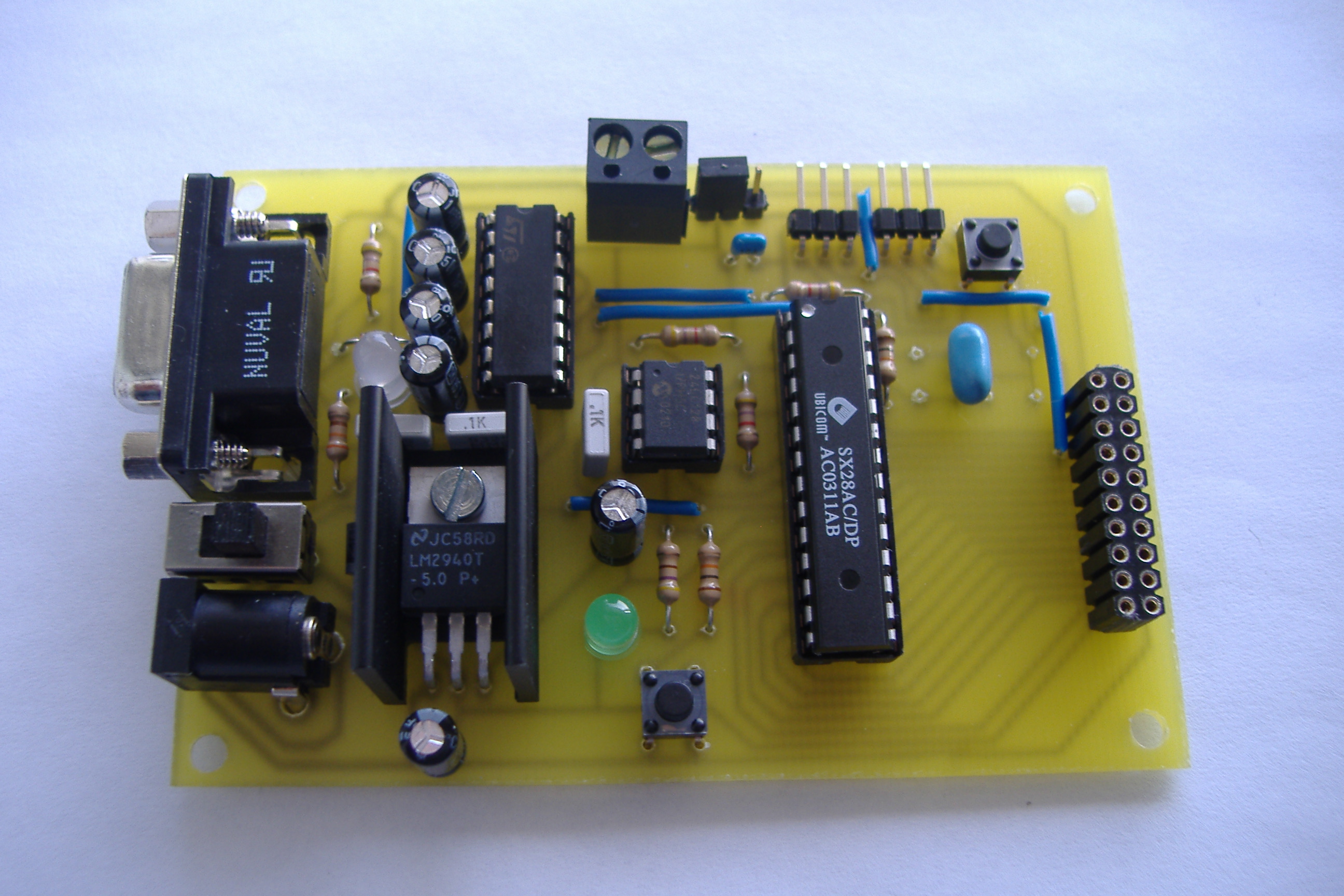
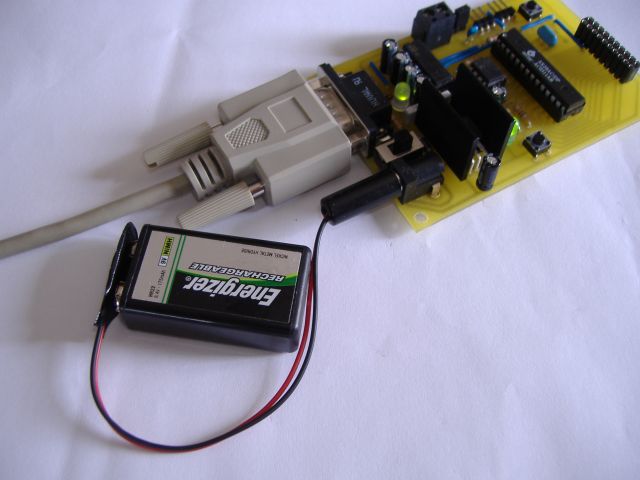
Immagine del prototipo della scheda da me
realizzata
| Elenco componenti | |
|
C1 |
100nF poliestere |
|
C2 |
10pF ceramico (vedi nota) |
|
C3 |
1µF 16V elettrolitico |
|
C4,C5 |
100nF multistrato |
|
C6 |
1µF 16V elettrolitico |
|
C7 |
10pF ceramico (vedi nota) |
|
C8 |
1uF 16V elettrolitico |
|
C9 |
1µF 16V elettrolitico |
|
C10 |
100 µF 16V elettrolitico |
|
C11 |
100nF multistrato |
|
C13 |
47µF 16V elettrolitico |
|
D1 |
|
|
D2 |
Doppio led (rosso/verde) Ø5mm |
|
D3 |
|
|
D4 |
Led verde. |
|
IC1 |
memoria 24LC128 + zoccolo 4+4 |
|
IC2 |
MAX232 + zoccolo 8+8 |
|
IC3 |
BS2SX (PARALLAX) + zoccolo 14+14 passo stretto |
|
IC4 |
|
|
JP1 |
JP2E |
|
P1 |
Pulsante miniatura per circuito stampato |
|
P2 |
Pulsante miniatura per circuito stampato |
|
Q1 |
Quarzo 50MHz (vedi nota) |
|
R1,R2,R3,R4 |
4,7kΏ ¼W |
|
R5 |
330Ώ ¼W |
|
R6 |
10kΏ ¼W |
|
R7 |
470Ώ ¼W |
|
RP |
10kΏ ¼W (nota) |
|
SW1 |
Deviatore per circuito stampato |
|
VAL1 |
DCJACK |
|
X1 |
presa seriale DB9 femmina |
|
X2 |
connettore maschio 3x1 90° |
|
X3 |
connettore maschio 3x1 90° |
|
X4 |
connettore femmina 10x2 |
|
X5 |
morsettiera doppia da stampato |
|
Y1 |
|
Realizzazione pratica.
Per la costruzione della scheda si procederà
iniziando dalla realizzazione del circuito stampato il cui lato rame in scala
1:1 è riportato sotto. Per la sua realizzazione si utilizzerà una basetta in
vetronite (monofaccia) di dimensioni 97x66 mm, il metodo potrà essere quello
della fotoincisione o del trasferimento termico utilizzando i cosiddetti fogli
blu (PRESS-N-PELL), in questo caso ricordo che l’immagine delle tracce del
circuito dovrà essere speculare.
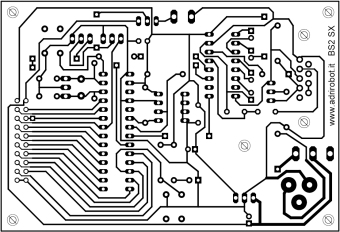
Circuito stampato.
Una volta inciso il rame, si verificherà in controluce o mediante l’utilizzo di
un multimetro che non vi siano cortocircuiti soprattutto tra le piste più
vicine.
Si passerà quindi alla foratura della stessa, utilizzando principalmente una
punta da 0,8 mm, mentre si utilizzeranno una da 0,9 mm per i diodi, il
regolatore di tensione, una dal diametro di 1 mm per le morsettiere, e
l’interruttore a slitta e infine una da 2,2 mm per il plug d’alimentazione.
In seguito si potrà passare al posizionamento e alla saldatura dei componenti
seguendo lo schema visibile sotto.
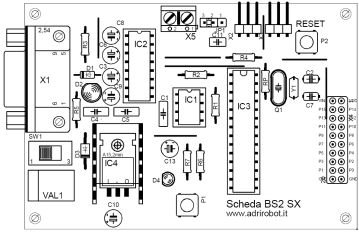
Disposizione dei componenti.
Per la saldatura si utilizzerà un piccolo
saldatore a punta fine, della potenza di circa 25 – 30 W.
S’inizierà dai 6 ponticelli, proseguendo con le resistenze, i diodi,
controllandone l’orientamento.
Si potrà quindi, procedere con il risuonatore ceramico, con gli zoccoli degli
integrati, i pulsanti, i condensatori facendo attenzione a quelli elettrolitici
che sono polarizzati.
Continuando con i pin-strip per il collegamento dei servomotori, la morsettiera
X4, facendo attenzione alla saldatura dei pin in quanto le piste sono molto
ravvicinate.
Restano poi da saldare il connettore seriale, l’integrato IC4 che andrà fissato
su una piccola aletta di raffreddamento, l’interruttore a slitta, la presa
d’alimentazione polarizzata e quella bipolare a vite.
Terminato la saldatura si potrà inserire gli integrati IC1, IC2 e IC3 negli
appositi zoccoli facendo attenzione alla tacca di riferimento.
Dettagli costruttivi della scheda
|
|---|
Schema elettrico della scheda OEM originale
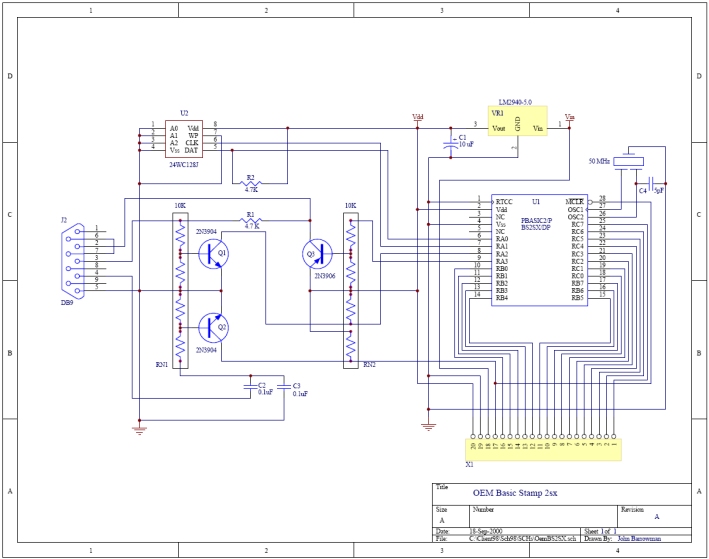
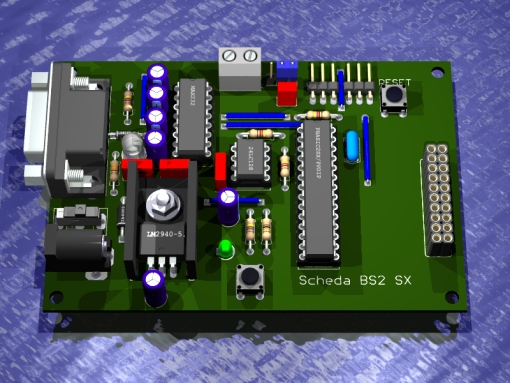
Immagine virtuale realizzata con il
programma EAGLE
| Elenco revisioni | |
| 04/05/2010 | Emissione preliminare |