
ultimo aggiornamento 7 ottobre 2009
|
ultimo aggiornamento 7 ottobre 2009 |
|
|
|
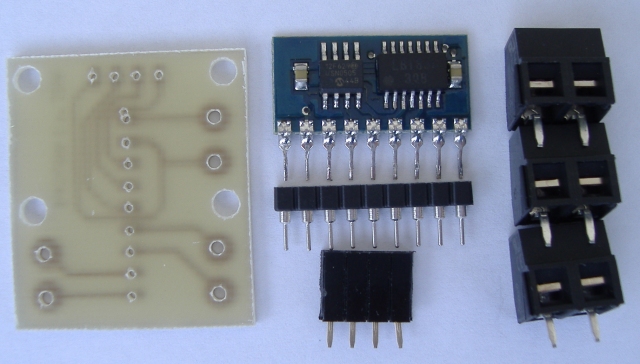
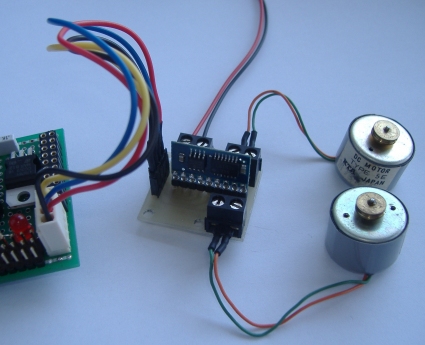
Quella visibile
nelle figura a fianco è un piccolo modulo (la basetta misura 44x22mm)
Utilizzo
Il modulo per il comando di motori DC, permette di pilotare 2 motori
elettrici, consentendone il controllo sia della velocità di rotazione sia
del suo senso tramite comandi inviati su linea seriale. La tensione
d’alimentazione dei motori, potrà essere compresa tra 1.8 - 9V con una
corrente massima di 1 A motore.
Descrizione
Il modulo si basa sul Micro Dual Serial Motor Controller che è una piccola
schedina prodotta dalla Pololu Robotics and Electronics, in cui è presente
un doppio ponte H formato dall'integrato LB 1836M (prodotto dalla SANYO) e
un PIC12F629 (prodotto dalla Microchip) per la gestione del ponte e per la
comunicazione seriale con la scheda di controllo. Questo controller consente
di pilotare due motori con 127 passi di velocità in due direzioni tramite
semplici comandi che sono impartiti dal processore per mezzo dell’utilizzo
di due porte.
Descrizione dei pin
|
||||||||||||||||||||||||||||||||||||||

|
||||||||
Montaggio e collaudo
Si collegheranno i motori, l’alimentazione, i segnali verso la
scheda di controllo seguendo lo schema-
Il collegamento sarà effettuato tramite il connettore CON5
(connettore RS232-TTL), mediante un apposito cavo da realizzare, in
questo caso il pin di RX (porta P10) viene utilizzato per il reset
del modulo.
Dopo aver fornito alimentazione alla morsettiera M3 (la tensione
deve essere quella di alimentazione dei motori) si potrà utilizzare
il programma di test modulo_motori_dc.cul che mostrerà i
comandi in esecuzione sullo schermo.
Circuito stampato e disposizione componenti
 |
 |

Schema di collegamento della scheda.
| Elenco revisioni: | |
| 07/10/2008 | Emissione preliminare |