
ultimo aggiornamento 7 ottobre 2009
|
ultimo aggiornamento 7 ottobre 2009 |
|
|
|
|
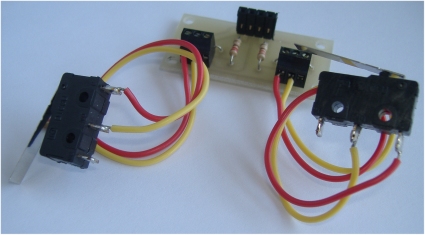
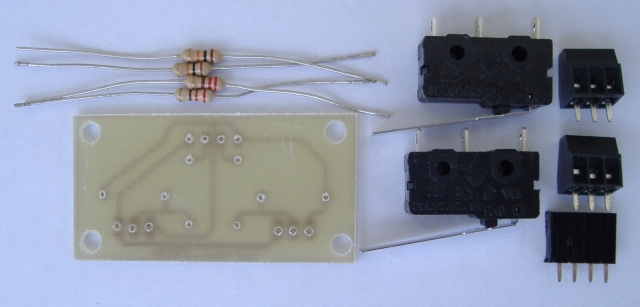
Quella visibile
nelle figura a fianco è un piccolo modulo (la basetta misura 44x22mm)
Descrizione
|
|
|
||||||||||

|
Montaggio e collaudo
A questo punto si
eseguiranno i collegamenti tra il connettore SV1 e CON3 della scheda
madre seguendo le indicazioni dello schema elettrico.
|
 |
||
 |
| Elenco revisioni: | |
| 07/10/2009 | Emissione preliminare |