![]()

ultimo aggiornamento 9 febbraio 2010
|
|
ultimo aggiornamento 9 febbraio 2010 |
|
|
|
|
L'alimentazione del robot è
fornita da 8 batterie contenute all'interno del marsupio.
Ho pensato così di realizzare un caricabatteria che permettesse la
ricarica contemporanea di tutte le 8 batterie.
|
||||
|---|---|---|---|---|
|
NC -> Non connesso
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|

Per
maggiori informazioni

|
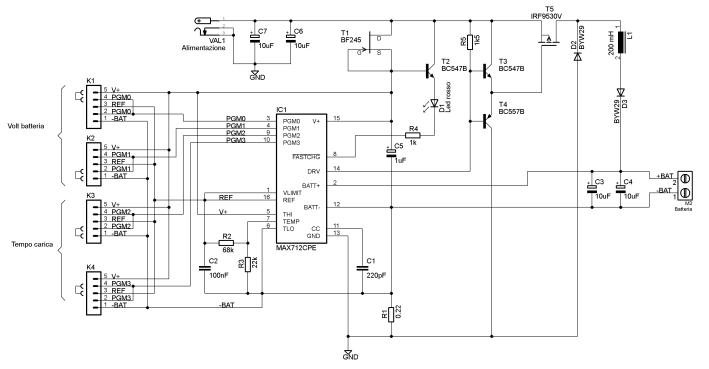
Elenco componenti |
|
|
C1 |
220 pFceramico |
|
C2 |
100 nFmultistrato |
|
C3,C4,C6,C7 |
10µF 25V elettrolitico |
|
C5 |
1µF 25V elettrolitico |
|
D1 |
led rosso |
|
D2,D3 |
|
|
T1 |
BF245 |
|
T2,T3 |
BC547B |
|
T4 |
BC557B |
|
T5 |
IRF9530V |
|
IC1 |
|
|
IC2 |
|
|
M2 |
MORSETTIERA 2 poli - Batteria |
|
J2 |
MORSETTIERA 2 poli |
|
L1 |
200 mH |
|
R1 |
0,22 Ω 5W |
|
R2 |
68kΩ ¼ W |
|
R3 |
22kΩ ¼ W |
|
R4 |
1 kΩ ¼ W |
|
R5 |
1,5 kΩ ¼ W |
|
K1,K2,K3,K4 |
Connettore maschio 5 pin |
|
VAL1 |
Presa polarizzata di alimentazione |

 |
 |
 |
 |

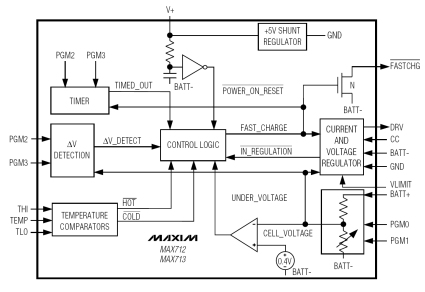
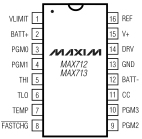
| MAX 712 NiMH Battery Fast-Charge Controllers | ||
 |
|
|
| Piedinatura | Datasheet | Foto dell'integrato |
| IRF9530 12A, 100V, 0.300 Ohm, P-Channel Power MOSFETs | ||
  |
|
|
| Piedinatura | Datasheet | Foto del transistor |
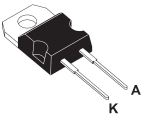
| BYW29 high efficiency fast recovery diodes. | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
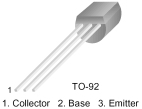
| Transistor BC547 (NPN Switching and Applications) | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
| Transistor BC557 (PNP Switching and Amplifier) | ||
|
|
|
|
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
| Elenco revisioni | |
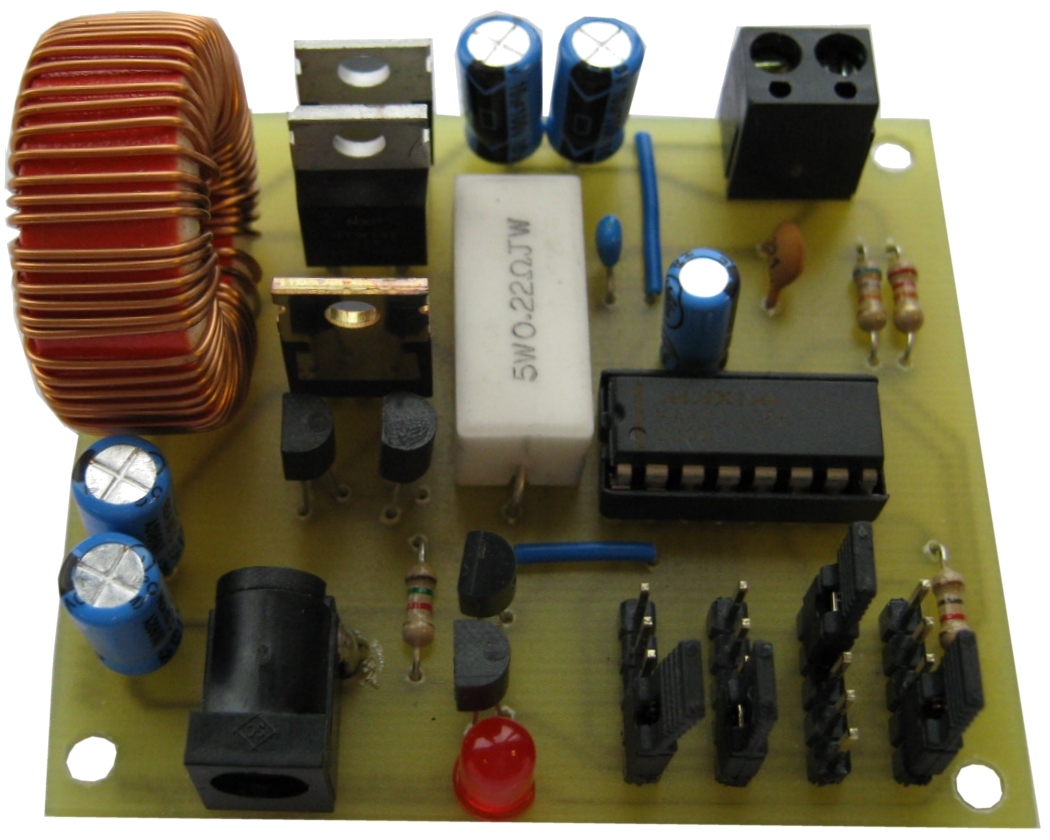
| 09/02/2010 | Aggiornato pagina con inserimento foto e schema del prototipo |
| 24/11/2008 | Inserito immagini circuito stampato e disposizione componenti |
| 25/08/2008 | Inserito foto caricabatteria originale |
| 05/03/2008 | Emissione preliminare |