![]()
![]()
ultimo aggiornamento 06/03/2006
|
|
ultimo aggiornamento 06/03/2006 |
|
|
|
|
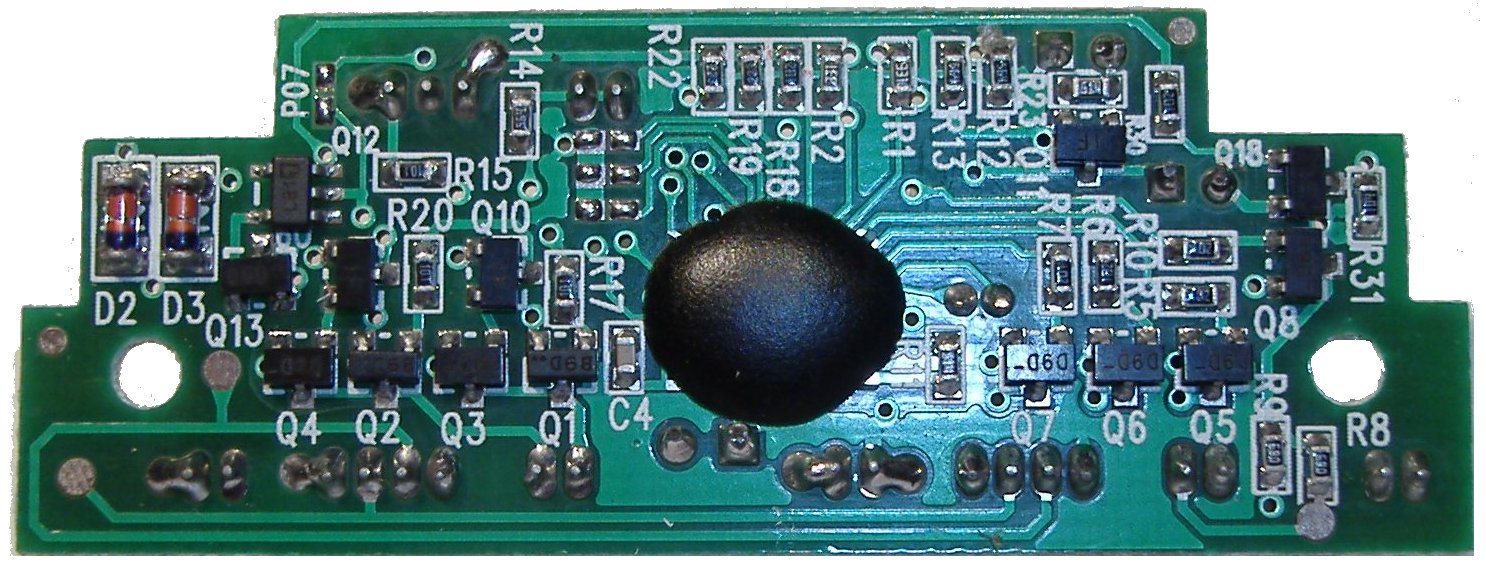
Per collegare il sensore di sfioramento e
per il collaudo della testa in questa prima fase viene fornita una
piccola scheda con un circuito doppia faccia (sigla 291-00582001-06) con
fori metallizzati le qui dimensioni massime sono di 60x22 mm. |
|

 |
 |
| Scheda controllo lato processore | Scheda controllo lato connettori |
SIGLE TRANSISTOR SMD
|
|---|
 |
IL SENSORE DI SFIORAMENTO |
 |
|
|
Nella foto sono mostrati i collegamenti alla scheda, il connettore PULSE per il momento non verrà utilizzato. Quelli che invece riguardano questa fase sono, partendo dall’alto a sinistra:
|
|
Siamo così pronti ad alimentare la testa di I-D01 e verificare che i
sistemi
montati funzionino correttamente. |
|
| Elenco revisioni | |
| 06/03/2006 | Emissione preliminare |