Modulo braccio
ultimo aggiornamento 22 ottobre 2016
|
|
Modulo braccio ultimo aggiornamento 22 ottobre 2016 |
|
|
|
|
Il modulo di controllo motore ha
il compito di pilotare il motore che serve all'apertura e chiusura della
pinza presente sul braccio del
robot Monty
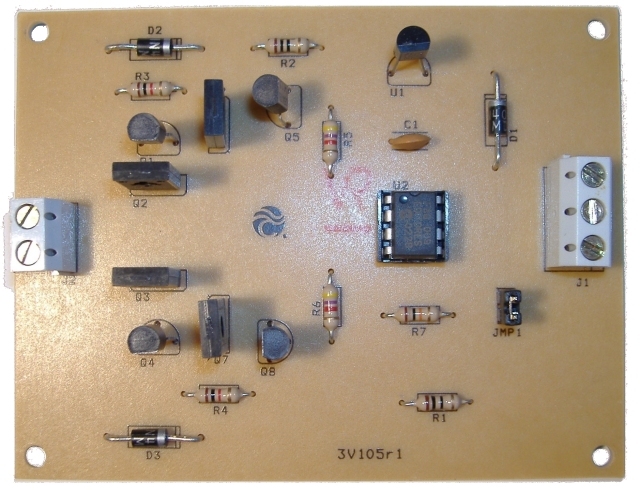
ed è formato principalmente da un ponte H basato realizzato tramite
transistor BC548 e BD135. |

Materiale necessario allegato ai fascicoli dal n° 53 al n°57





Foto della scheda da me assemblata |
|
|
 |

 Vista esterna del braccio del robot |
 Vista interna del braccio |
|
Questa e la pinza di cui sarà dotato il robot in
uno dei suoi bracci. Sarà comandata da un motore a corrente continua, e servirà per raccogliere oggetti e depositarli dove vogliamo. Per controllare l'apertura e la chiusura utilizziamo la scheda descritta in questa pagina, questa governerà il senso di rotazione di questo motore |
|

Dettaglio del treno di ingranaggi
Schema elettrico della scheda di potenza movimento braccio
|
||||||||||||||||||||||||||||||
Sezione alimentazione

L'immagine mostra lo schema di collegamento della scheda di controllo alla pinza, Questo si realizza tramite il morsetto J1 Con i piedini 1 e 2 si introduce una tensione di +9 Vcc, con la quale si alimenta il motore, Questa tensione si applica anche al regolatore 78L05 (U1), da cui si ottiene una tensione di +5 Vcc per alimentare il PIC12C508A incaricato delle funzioni di controllo Tramite il piedino 3 della stessa morsettiera si applica, dalla scheda di controllo e tramite quella di potenza, il segnale di apertura e di chiusura
Sezione ponte H
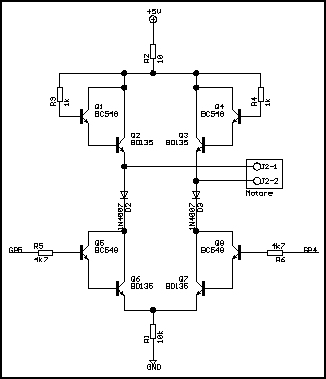
Per la gestione del motore della pinza utilizziamo un ponte ad M, simile a quello della scheda di potenza per il controllo dei motori di direzione del robot. Questo ponte ad H sarà incaricato di amplificare i segnali e alimentare il motore, Tramite questo ponte potremo governare sia l'accensione che /o spegnimento del motore e anche il senso di rotazione con cui la pinza si apre o si chiude.
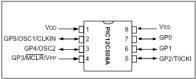
Sezione Processore

| Processore PIC 12C508A | ||
 |
|
 |
| Piedinatura | Data sheet | Foto del processore |
| LM 78L05 Regolatore di tensione | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
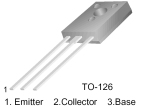
| Transistor NPN BD135 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
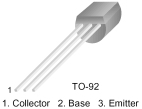
| Transistor PNP BC 548 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
| Diodo 1N4007 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
| Elenco revisioni | |
| 22/10/2016 | Aggiornato pagina |
| 21/06/2012 | Aggiornato pagina |
| 26/04/2006 | Inserito PDF istruzioni di montaggio |
| 06/03/2006 | Aggiornato pagina, con inserimento elenco componenti e data sheet componenti utilizzati |
| 27/05/2005 | Emissione preliminare |