Modulo sensori
ultimo aggiornamento 24 luglio 2016
|
Modulo sensori ultimo aggiornamento 24 luglio 2016 |
|
|
|
Descrizione:
Allegati ai fascicoli dal n°34 sino al n°43 vengono forniti i componenti necessari per la costruzione della scheda sensori del robot Monty.

Componenti allegati ai fascicoli
  |
  |
  |
| Fascicolo 34 | Fascicolo 35 | Fascicolo 36 |
  |
  |
  |
| Fascicolo 37 | Fascicolo 38 | Fascicolo 39 |
  |
  |
  |
| Fascicolo 40 | Fascicolo 41 | Fascicolo 42 |
  |
| Fascicolo 43 |
![]()
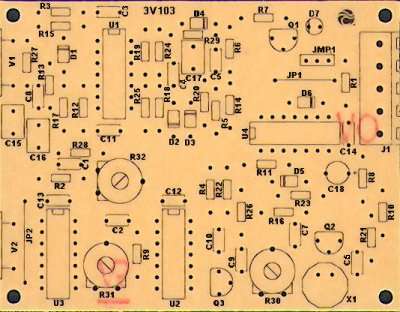
Rappresentazione 3D della scheda sensori |
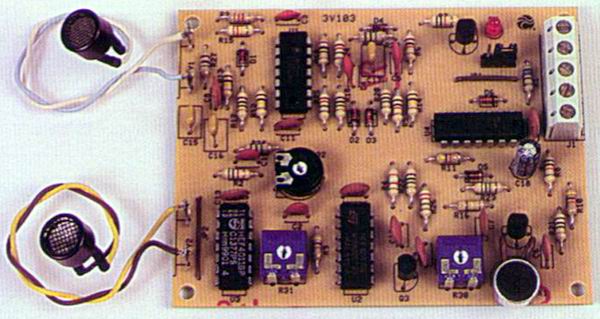
Foto della scheda da me assemblata |
|
|
![]()
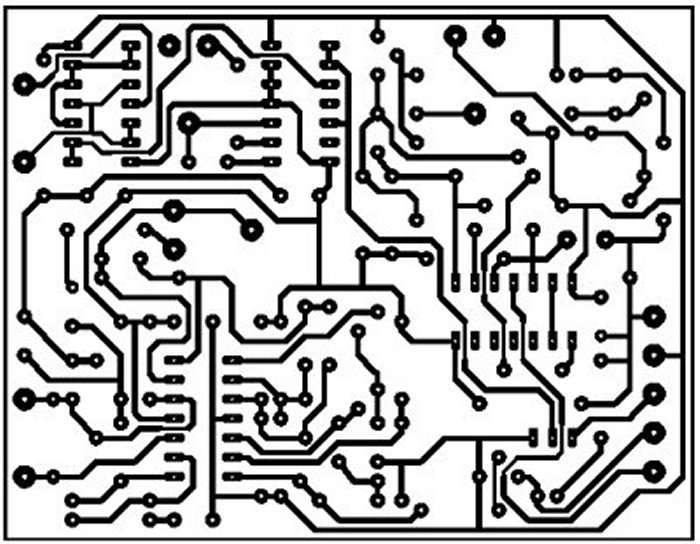
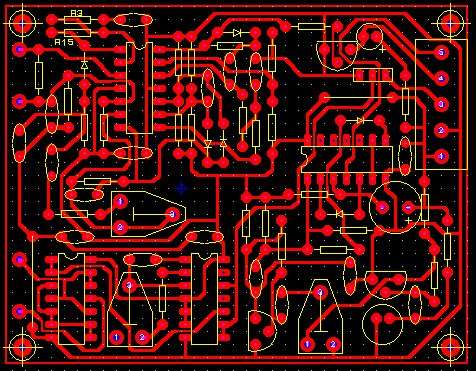
Schema elettrico della scheda sensori
 |
|
![]()
| Elenco componenti | |||
| R1 | 560 W ¼ W | C18 | 22 mF 35Vl elettrolitico |
| R2 | 1 KW ¼ W | C15-C16-C17 | 470 nF |
| R3, R26 | 2,2 KW ¼ W | D1, D2, D3, D4, D5, D6 | 1N4148 |
| R4 | 3,9 KW ¼ W | D7 | Led rosso 3mm |
| R5, R6, R7, R8 | 10 KW ¼ W | U1 | LM324 |
| R12, R13, R14 | 100 KW ¼ W | U2 | CD 4047 |
| R15 | 220 KW ¼ W | U3 | CD 4011 |
| R9, R10, R11 | 47 KW ¼ W | U4 | SN74HC14 |
| R16 | 470 KW ¼ W | Q1, Q2, Q3 | BC547 o BC548 |
| R17, R18, R19, R20, R21, R22, R23 | 1MW ¼ W | X1 | Capsula microfonica preamplificata |
| R24, R25 | 1,2 MW ¼ W | Y1 | Ricevitore ad ultrasuoni |
| R26 | 2,2 MW ¼ W | Y2 | Emettitore di ultrasuoni |
| R27, R28, R29 | 10 MW ¼ W | JMP1 | Ponticello |
| R30 | 4,7KW Trimmer | Y1-Y2 | Contatti CS per capsule ultrasuoni |
| R31 | 10 KW Trimmer | J1 | Morsettiera 3 contatti |
| R32 | 1 MW Trimmer | J1 | Morsettiera 2 contatti |
| C1,C2 | 100 pF ceramico | n° 4 zoccoli per integrato 7+7 | |
| C3, C4, C5 | 10 nF ceramico | 1 circuito stampato 3V103 | |
| C6, C7 | 22 nF ceramico | ||
| LM 324 Quadruplo amplificatore operazionale a bassa potenza | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
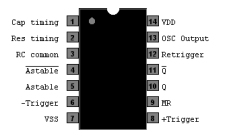
| CD 4047 Multivibratore monostabile/astabile | ||
 |
|
|
| Piedinatura | Datasheet | Foto dell'integrato |
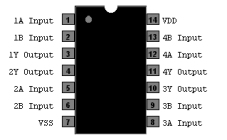
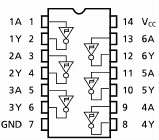
| CD 4011 Quadrupla porta NAND | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| SN74HC14 HEX SCHMITT-TRIGGER INVERTERS | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
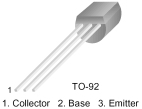
| Transistor BC547-BC548 (NPN Switching and Applications) | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del transistor (contenitore plastico) |
![]()
Descrizione circuito emissione ultrasuoni
| Per il rilevatore di movimento è necessario
un circuito che produca un'oscillazione nota, per attivare la capsula di
trasmissione e di un altro circuito che converta il segnale ricevuto e ci
indichi quando riceva qualcosa. Nella figura è riportato lo schema della sezione di trasmissione, che è un oscillatore, il cui periodo è controllato dal circuito 4047, e che produce un'onda a 40 kHz. Alla sua uscita abbiamo un quadruplo inverter (all'interno dell'integrato 4011) formato da porte NAND che producono un' effetto amplificatore. Il trimmer R31 serve per regolare la frequenza di emissione sui 40 MHz.
|
 |
Descrizione circuito ricezione ultrasuoni
|
La sezione di ricezione è
formata da quattro stadi, ognuno dei quali contiene un amplificatore
operazionale LM324.
|
|
Descrizione circuito rilevazione suoni
|
Nella figura è riportato lo schema del
rilevatore di suono.
|
|
Collaudo sezione ad ultrasuoni
Una volta completato il montaggio si potrà
passare al collaudo.
Per fare questo dovemmo alimentare prima di tutto la scheda mediante una
tensione di 5V, per cui dovremmo collegare un' alimentatore in grado di
fornire tale tensione collegando in positivo alla morsettiera numerata con
"1" e il negativo al morsetto "2".
Le capsule devono essere perfettamente allineate con una distanza minima tra
loro, in modo che non producano interferenze.
La capsula di emissione invia un segnale che dopo aver rimbalzato su un
ostacolo torna alla capsula di ricezione.
se l'allineamento non è adeguato e la distanza fra le capsule è troppo
elevata il sensore non si comporterà correttamente.
Tramite il jumper JM1 selezioneremo a questo punto il modo di emissione
continuo (nella figura è posto invece in modalità controllata).
Ora dovremmo passare la mano od un' oggetto di fronte ai sensori e
controlleremo l'accensione del led D7.
Varieremo la posizione del trimmer R32 per la sensibilità, e il trimmer R31
sino a quando il comportamento del sensore sarà soddisfacente.
 |
 |
![]()
Collaudo sezione rilevazione sonora
Per il collaudo della sezione sonora occorre
alimentare prima di tutto la scheda mediante una tensione di 5V, per cui
dovremmo collegare un' alimentatore in grado di fornire tale tensione
collegando in positivo alla morsettiera numerata con "1" e il negativo al
morsetto "2".
Collegheremo poi un tester utilizzato come voltmetro con il puntale negativo
sul morsetto "2" e il positivo sul morsetto "5".
Ora proveremo a battere le mani, quando il sensore si attiverà si dovrebbe
leggere una tensione prossima ai 5 Volt sul tester, potremmo variare la
sensibilità agendo sul trimmer R30.
|
|
 |
![]()
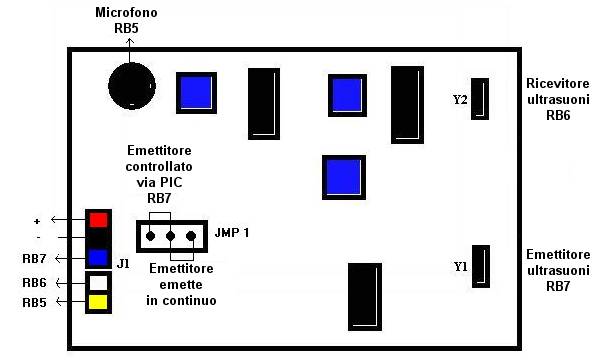
Posizionamento e numerazione morsettiere e trimmer
![]()
Piano di collegamento con indicazioni delle porte utilizzate del PIC
![]()
| Elenco revisioni documento: | |
| 24/07/2016 | Inserito disegno circuito stampato |
| 25/04/2012 | Aggiornato pagina |
| 26/05/2006 | Aggiornato schede componenti elettronici |
| 26/04/2006 | Inserito PDF istruzioni di montaggio |
| 27/05/2005 | Emissione preliminare |
| 25/08/2005 | Aggiornato pagina, con inserimento schema elettrico e descrizione circuito e collaudo. |
![]()