
ultimo aggiornamento 21 marzo 2011
|
ultimo aggiornamento 21 marzo 2011 |
|
|
|
Questo capitolo (il testo è tratto dal manuale d'uso - Capitolo 3) descrive ciascuna delle parti che costituiscono il robot mOway.




E 'importante per evidenziare che non è necessario conoscere il funzionamento complessivo del robot per essere in grado di programmarlo, almeno non a livello di dettaglio spiegato qui. I seguenti elementi si trovano all'interno mOway:
![]()
Manuale d'uso del robot V.2.1.0

Image 1. Schema delle parti mOway's
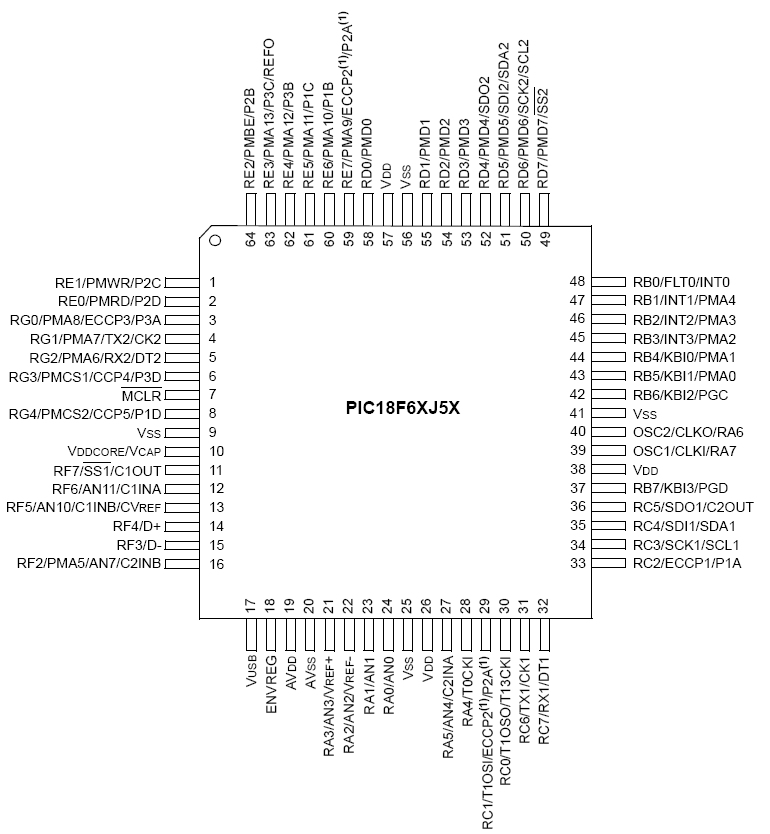
Il cuore del robot
mOway è rappresentato dal un microcontrollore PIC18F87J50
funzionante a 4 Mhz prodotto da Microchip Technologies. Tutte le
periferiche distribuite in tutto il robot suo complesso sono connesso alla sua
porte di ingresso / uscita.
Alcuni di loro hanno bisogno di un ingresso digitale o l'uscita, altri bisogno
di un ingresso analogico o in uscita e altri, invece, sono controllati da uno
dei comunicazione bus I2C/SPI . La tabella seguente descrive come i pin del
microcontrollore sono distribuiti.
|
Pin PIC |
I/O |
Sensor |
|
|
PORTA |
|
||
|
RA0 |
I |
Light |
|
|
RA1 |
I |
Central left infrared receiver |
|
|
RA2 |
I |
Right line sensor receiver |
|
|
RA3 |
I |
Side left infrared receiver |
|
|
RA5 |
I |
Left line sensor receiver |
|
|
PORTB |
|
||
|
RB1 |
I |
First interruption of the accelerometer |
|
|
RB2 |
I |
Second interruption of the accelerometer |
|
|
RB3 |
O |
Speaker |
|
|
RB5 |
O |
Top red LED |
|
|
RB6 |
O |
Top green LED |
|
|
PORTC |
|
||
|
RC7 |
O |
Front LED |
|
|
PORTD |
|
|
|
|
RD1 |
O |
Line sensors transmitter |
|
|
RD4 |
I |
Segnale SDO per la comunicazione SPI (accelerometro) |
|
|
RD5 |
O |
Segnale SDI per la comunicazione SPI (accelerometro) |
|
|
RD6 |
O |
Segnale Clock per la comunicazione SPI (accelerometro) |
|
|
RD7 |
I |
Chip Select per la comunicazione SPI (accelerometro) |
|
|
PORTE |
|
||
|
RE5 |
O |
Brake LED |
|
|
PORTF |
|
||
|
RF5 |
I |
Side right infrared receiver |
|
|
RF6 |
I |
Central right infrared receiver |
|
|
PORTH |
|
||
|
RH5 |
I |
Tempreature sensor |
|
|
RH6 |
I |
Battery measurer |
|
|
RH7 |
I |
Microphone |
|
|
PORTJ |
|
|
|
|
RJ6 |
O |
Infrared transmitter |
|
|
RJ7 |
I/O |
Free pad |
|
Tabella 1. PIC-connessione dei sensori
| PIC18F87J50 High-Performance, 1-Mbit Flash USB Microcontrollers | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
Per essere in grado di spostarsi il
robot mOway utilizza un doppio gruppo servo-motore.
Esso comprende sia
una parte elettronica che una meccanica. La parte elettronica è principalmente
responsabile della controllare la velocità del motore e la parte meccanica
permettono di muovere mOway libero su diversi terreni, con una potenza adeguata.

Immagine 2. Sistema di azionamento: elettronico e meccanico
Il gruppo di servo-motore include funzioni diverse:
1. Controllo velocità: controlla la velocità di ciascun motore.
2. Tempo di controllo: controlla il tempo per ogni comando con una precisione di
100 ms.
3. Controllo della distanza percorsa: Controlla la distanza percorsa da ogni
comando
con una precisione di 1 mm ca.
4. Generale tachimetro: misura le distanze percorse dal comando iniziale.
5. Controllo dell'angolo: controlla l'angolo di quando il robot mOway
ruota.
Il microcontrollore principale invia il comando I2C al sistema di
azionamento che controlla i
motori e quindi rilasciando il microcontrollore principale in modo che possa
svolgere altri compiti.
Il controllo della velocità si effettua per mezzo di un controllo proporzionale con
segnale negativodi feedback da parte degli encoder.
L'illustrazione mostra il sistema
di controllo. Il microcontrollore alimenta i motori attraverso un ponte H
controllando da
larghezza dell'impulso dei segnali della
modulazione (PWM).
La rotazione della ruota è controllata da un adesivo e
una codifica
sensore infrarosso. Se l'immagine mostra il suo segmento nero, l'uscita logica
deve essere di 1
e quando si mostra il settore del bianco l'uscita è pari a 0.
Il
microcontrollore analizza
questi segnali (si può determinare l'esatta velocità della ruota misurando la
larghezza di impulsi) e
agisce sui motori.
In questo modo il robot mOway sarà in grado di mantenere la
velocità costante su ogni
di superficie.
 |
|
Immagine 3. Schema controllo motore
Per inviare un comando di movimento al robot, attraverso il microcontroller
principale, occorre inviare i parametri di comando di movimento.
A tal fine si utilizzano alcune
librerie che sono state
progettate in linguaggio assembler e C per facilitare le comunicazioni
attraverso il bus di comunicazione I2C.
La tabella seguente descrive i collegamenti tra la scheda principale e l'unità
servomotore.
Tabella 2. Connessione del Processore al gruppo motore
|
Pin PIC |
I/O |
|
Sensore |
|
PORTE |
|
||
|
RE0 |
I2C |
|
I2C clock |
|
RE1 |
I2C |
|
I2C data |
|
RE7 |
I |
|
END_COMAND line |

Immagine 4. Posizionamento dei sensori e dei led indicatori

Immagine 5. Vista superiore del PCB del robot mOway
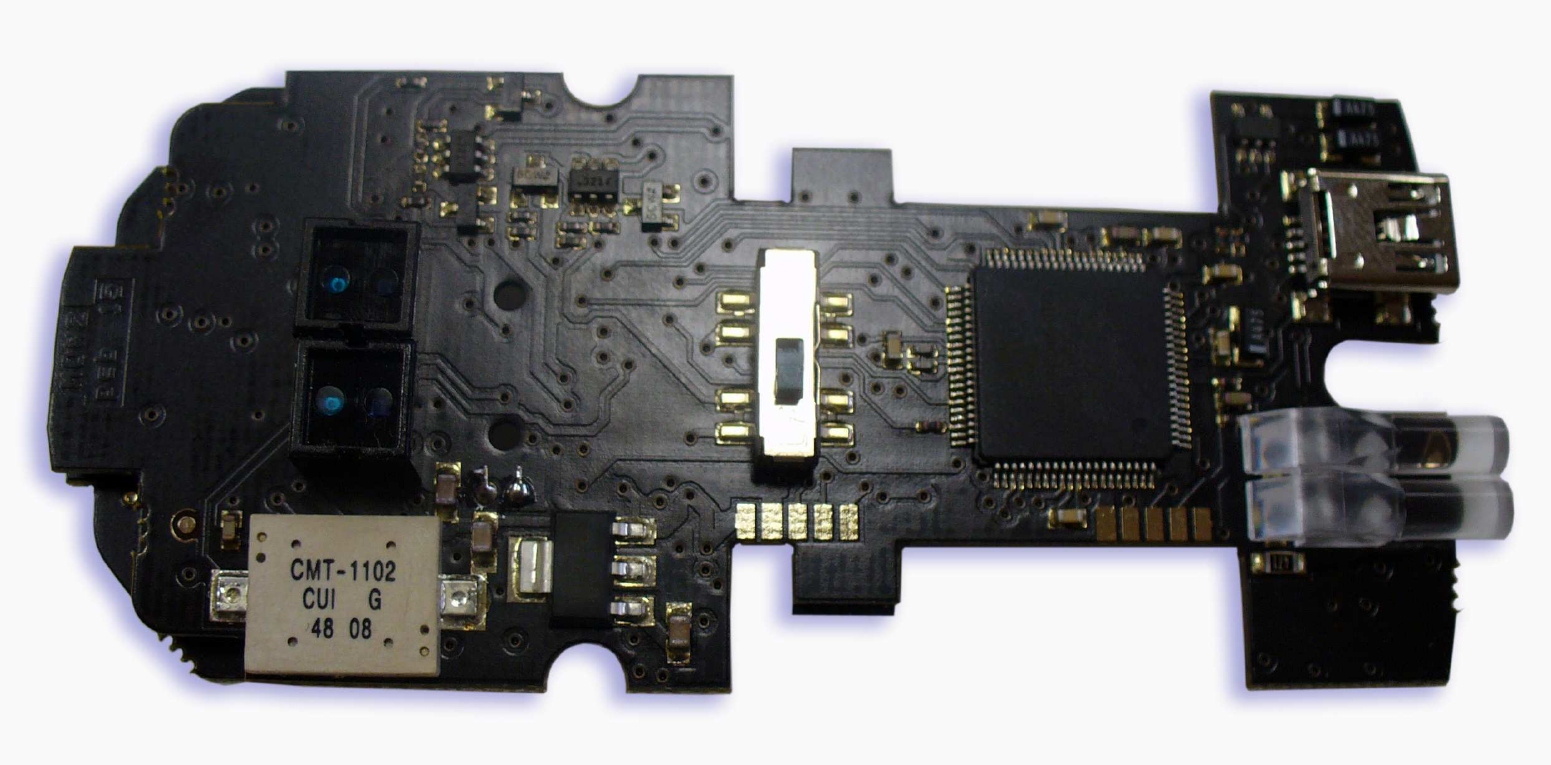
Immagine 6. Vista inferiore del PCB del robot mOway
I sensori di tracciamento linea sono due accoppiatori ottici
a riflessione montati
sulla parte frontale anteriore del robot.
Usano la riflessione della luce a infrarossi per rilevare il
colore del terreno nel punto in cui si trova il robot.
Questi due sensori sono collegati a due porte analogiche del microcontrollore così
è possibile rilevare forti contrasti, come le linee bianche su sfondi neri.
Essi sono anche
in grado di distinguere toni diversi.
Il sensore CNY70 Vishay ha una costruzione compatta, dove la luce che emettono
sorgente e il rivelatore sono disposti nella stessa direzione per essere in
grado di rilevare tramite
il raggio IR riflettenti la luce riflessa del terreno.
Nelle immagini qui sotto i tre casi possibili si possono osservare:
Superficie chiara: una superficie bianca riflette tutta la luce infrarossa e quindi si ottiene una lettura a bassa tensione di uscita del transistor, quando in modalità normale.

Image 7. Linea di monitoraggio del sensore su una superficie chiara.
| Sensore ottico a raggi infrarossi a riflessione tipo CNY70 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del sensore |
Superficie Colorata: una superficie colorata riflette parte della luce emessa ottenere una tensione intermedia a analogico del microcontrollore canale di ingresso. Questo modo i colori sono facilmente identified. A causa della tolleranza dei due sensori CNY70 i valori possono differire

Immagine 8. Linea di monitoraggio del sensore su una superficie colorata.
Superficie nera: una superficie scura riflette la poca luce per ottenere un elevato lettura della tensione in uscita del sensore.

Immagine 9. Linea di monitoraggio del sensore su una superficie scura.
Tabella 3. Line tracking sensors -PIC connections
|
Pin PIC |
I/O |
|
Sensor |
|
PORTA |
|
|
|
|
RA2 |
|
I |
Right line tracking sensor receiver |
|
RA5 |
|
I |
Left line tracking receiver |
|
PORTD |
|
|
|
|
RD1 |
|
O |
Left and right line tracking sensors transmitter |

Immagine 10. Posizione dei sensori di linea
Sensori di rilevamento ostacoli
Simile ai sensori di rilevamento linea, i sensori di rilevamento ostacoli
usano la luce a infrarossi
per rilevare gli oggetti situati di fronte al robot mOway.
Il sensore include due
sorgenti emittente raggi infrarossi ( tipo KPA3010-F3C
della Kingbright) e quattro
ricevitori posizionati su entrambi i lati del robot mOway.
L'uscita dei ricevitori tipo PT100F0MP della Sharp sono collegati agli
ingressi analogici del microcontrollore in modo che possa rilevare la presenza di
qualsiasi oggetto (modalità digitale)
e anche misurare la distanza (modalità analogica), a causa della tolleranza
dei due differenti sensori possono differire l'uno dall'altro.
Le funzioni del sensore è modo simile al sensore di monitoraggio linea.
L'emettitore di luce
genera un impulso di 70µs che permette al ricevitore di catturare qualsiasi
ostacolo utilizzando un
di filtraggio e di uno stadio di amplificazione.
Una volta che il segnale viene
elaborato elettronicamente, il PIC può
misurarlo attraverso l'ADC o come un ingresso digitale.
Nel funzionamento digitale la
distanza di rilevamento è vicino
a 3 cm, in un ambiente luminoso si raccomanda di aumentare il riflesso della luce
infrarossa.

Image 11. Sensore di rilevamento ostacoli
|
Pin PIC |
I/O |
|
Sensore |
|
PORTA |
|
|
|
|
RA1 |
|
I |
Central right infrared receiver |
|
RA3 |
|
I |
Side left infrared receiver |
|
PORTF |
|
|
|
|
RF5 |
|
I |
Side right infrared receiver |
|
RF6 |
|
I |
Central left infrared receiver |
|
PORTJ |
|
|
|
|
RJ7 |
|
O |
Infrared transmitter |

Immagine 12. Posizione del sensore di ostacolo
| KPA-3010F3C - 3.0x1.0 mm RIGHT ANGLE INFRARED EMITING DIODE | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
| PT100MF0MP Surface Mount Type, Opaque Resin Phototransistor | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
Questo sensore permette al robot mOway di riconoscere l'intensità della luce che entra
attraverso un
mezzo piccola apertura a forma di luna sulla parte superiore del telaio.
Dal
momento che è rivolta in avanti
permette di rilevare dove si trova la fonte di luce e di agire di
conseguenza.
L'uscita del sensore APDS AVAGO-9002 è collegato alla porta analogica del
microcontrollore in modo che con una semplice lettura di tipo ADC è in
grado di registrare il livello di intensità della luce e qualsiasi cambiamento
nei livelli di intensità sulla base delle ultime letture.
Per avere una valida lettura occorre disattivare il led bicolore.
Tabella 5. PIC -light sensor connection
|
Pin PIC |
I/O |
|
Sensore |
|
PORTA |
|
|
|
|
RA0 |
|
I |
Luce |

Immagine 13. Posizione del sensore di luce
| APDS-9002 Miniature Surface-Mount Ambient Light Photo Sensor | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
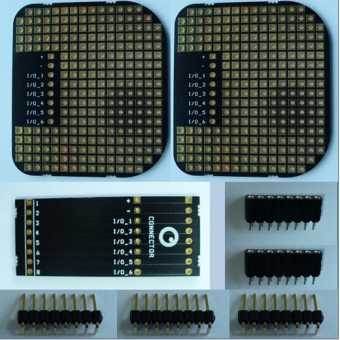
Questo connettore consente al
robot mOway per connetterti con eventuali moduli
commerciali o
circuiti elettronici che l'utente può scegliere.
Come indicato nella tabella 6 è possibile collegare dispositivi commerciali
SPI.
Il modulo RF BZI-RF2GH4 disponibile sul mercato è totalmente
compatibile con il robot mOway e con le librerie specifiche.
Questo modulo permette a mOway
comunicare con altri robot e con un PC tramite il RFUsb.
Con questo modulo è possibile creare applicazioni di collaborazione complessi
senza doversi preoccupare di complicate le comunicazioni wireless.
Tabella 6. Expansion connector connections
|
Pin Expa |
I/O |
PIC |
|
Pin1 |
O |
Vcc 3.3v |
|
Pin2 |
O |
GND |
|
Pin3 |
I/O /PMD3/AN12/P3C /C2INC |
RH4 |
|
Pin4 |
I/O/PMA5/AN7/C2INB |
RF2 |
|
Pin5 |
I/O /SCK1/SCL1 |
RC3 |
|
Pin6 |
I/O /SDO1/C2OUT |
RC5 |
|
Pin7 |
I/O /SDI1/SDA1 |
RC4 |
|
Pin8 |
I/O/INT |
RB0 |
|
|
|
Immagine 14. Moduli RF e scheda di espansione.
Il robot mOway
ha installato un misuratore di temperatura rappresentato da un termistore NTC Murata,
un semiconduttore elettrico variabile la cui resistenza diminuisce all'aumentare
della temperatura.
Il sensore si trova nella parte anteriore del robot, molto vicino al sensore di
ostacoli.
Il termistore è collegato alla porta analogica del microcontrollore in modo che
con una semplice lettura di tipo ADC è possibile ottenere il valore di temperatura.
Data la sua posizione, la temperatura misurata
dal sensore può essere di 5 °C superiore alla temperatura esterna.
Tabella 7. PIC-Temperature sensor connection
|
Pin PIC |
I/O |
|
Sensore |
|
PORTH |
|
|
|
|
RH5 |
|
I |
Temperature sensor |
Il CMT-1102 altoparlante prodotto dalla CUI Inc. collegati direttamente al microcontrollore, è in grado di riprodurre i toni da 250 Hz a 65 kHz.
Tabella 8. PIC-Speaker connection
|
Pin PIC |
I/O |
|
Sensore |
|
PORTB |
|
|
|
|
RB3 |
|
O |
Speaker |
Specifiche di funzionamento
|
Operating Voltage |
25 vp-p |
|
Current Consumption |
4.5mA |
|
Sound Pressure Level |
8dB |
|
Operating Temperature |
-40 to +80°C |
|
Storage Temperature |
-40 to +80°C |
|
Dimensions (LxWxH) |
11mm x 9mm x 1.7mm |
|
Weight |
0.5 grams |
| CMT-1102 piezo audio transducer | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
Il microfono
CMC-5042PF-AC prodotto dalla CUI Inc permette al robot di rilevare
suoni compresi tra 100 Hz e 20 KHz.
L'uscita è collegato direttamente ad un ingresso analogico del microcontrollore
in modo che sia
in grado di rilevare non solo se c'è il suono o no (modalità digitale), ma anche
l'intensità della
il suono con una semplice lettura della ADC (modalità analogica).
Tabella 9. PIC - Connessione del Microfono
|
Pin PIC |
I/O |
|
Sensore |
|
PORTH |
|
|
|
|
RH7 |
|
I |
Microfono |
| CMC-5042PF-AC electret condenser microphone | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
Specifiche di funzionamento
|
Directivity |
omnidirectional |
|
Sensitivity |
-42 dB ± 3 dB |
|
Sensitivity Reduction |
3 dB |
|
Operating Voltage |
2.0 Vdc |
|
Output Impedance |
2.2 KΩ |
|
Operating Frequency |
100 ~ 20,000 Hz |
|
Current Consumption |
0.5 mA |
|
Signal to Noise Ratio |
56 dBA |
|
Operating Temperature |
-20 ~ +70° C |
|
Storage Temperature |
-20 ~ +70° C |
|
Dimensions |
Ø6.0 x 5.0 mm |
|
Weight |
0.30 g |
|
Material |
Al |
|
Termination |
pin type |
Accelerometro
Un accelerometro è un dispositivo che misura l'accelerazione e la forza indotta
dalla gravità: il movimento e la rotazione.
Ci sono molti tipi di accelerometri, la
maggior parte dei
quali si basa su cristalli piezoelettrici, ma questi sono di grandi dimensioni.
A
causa di ciò, si è cercato di disegnare un piccolo dispositivo nel campo della
microelettronica, che potesse migliorare l'applicabilità.
Sono così nati gli accelerometri MEMS (MicroElectroMechanical
Systems).
Un modo semplice per creare un accelerometro è misurare le modifiche in un
condensatore. I condensatori possono funzionare come sensori o come attuatori.
Nel caso del robot mOway,
l' accelerometro è di tipo capacitivo, che consiste di due condensatori
collegati in modo differenziale
la cui
variazioni di capacità elettrica varia come l'accelerazione.
Misurando tramite l'accelerometro MMA7455L
(prodotto dalla Freescale Semiconductor) i valori di X, Y, Z è possibile sapere se
mOway sia posizionato
correttamente,
invertito o inclinato.
Tabella 10. PIC-Accelerometer connection
|
Pin Acce |
I/O |
|
PIC |
|
Pin7 |
|
I |
RD7 |
|
Pin8 |
|
I |
RB1 |
|
Pin9 |
|
I |
RB2 |
|
Pin12 |
|
I |
RD4 |
|
Pin13 |
|
O |
RD5 |
|
Pin14 |
|
O |
RD6 |
| MMA7455L: XYZ-AXIS ACCELEROMETER ±2g/±4g/±8g | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
Il robot ha una batteria di celle Lipo ricaricabile. Per un corretto
funzionamento della
microcontrollore, la batteria è collegata ad uno dei suoi ingressi analogici
attraverso un partitore.
Così, il livello della batteria può essere misurata con una lettura ADC.
Tabella 11. PIC Connessione controllo batteria
|
Pin PIC |
I/O |
Sensore |
|
Porth |
||
|
RH6 |
I |
Livello della batteria |
Il frontale LED è un LED bianco posto sul lato anteriore del robot mOway. L'uscita digitale del microcontrollore è collegato ad un led tipo LW A6SG LED prodotto dalla OSRAM.
Tabella 12. PIC -front LED connections
|
Pin PIC |
I/O |
|
Sensor |
|
PORTC |
|
|
|
|
RC7 |
|
O |
Front LED |
| LW A6SG - Hyper SIDELED® long life Enhanced optical Power LED (ThinGaN®) | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
Questo doppio indicatore
utilizza la stessa apertura sulla parte superiore del robot utilizzata dal sensore di luce. Essi sono collegati a due
uscite digitali del microcontrollore.
In quanto essi condividono la stessa apertura, come la luce del sensore di luce
è fondamentale che siano disattivati se si vuole effettuare una lettura alla
massima intensità.
Tabella 13. PIC-Top LED connection
|
Pin PIC |
I/O |
Sensor |
|
PORTA |
|
|
|
RA4 |
O |
Top red LED |
|
PORTB |
||
|
RB6 |
O |
Top green LED |

Image 15. Robot con LED anteriore e led rosso acceso
Il doppio indicatore LED del freno è posto sul retro del robot mOway. L'uscita è collegato a una delle uscite digitali del microcontrollore.
Tabella 14. PIC-Brake LED connection
|
Pin PIC |
I/O |
|
Sensor |
|
PORTE |
|
|
|
|
RE5 |
|
O |
Brake LED |

Immagine 16. Stop a LED posizione. Accendere il LED verde.
Il robot mOway ha implementato una porta libera per consentire agli utenti di connettere i propri sensori. Questo è accessibile aprendo il robot, e si trova vicino al LED6 (freno)
Tabella 15. PIC-free Pad connection
|
Pin PIC |
I/O |
Sensor |
|
PORTJ |
|
|
|
RJ7 |
I/O |
Free Pad |
La batteria del robot mOway si trova all'interno e accessibile solo attraverso la scomposizione del robot. Si tratta di una piccola batteria ricaricabile LiPo, tensione 3.7V - 350 mAh

La batteria può essere ricaricata tramite porta USB di un computer attraverso
la porta MINI-USB-B.
Non c'è bisogno di aspettare che la batteria sia completamente
scarica,
come si può essere ricaricata in qualsiasi momento, dato che queste batterie non
hanno effetto memoria.
Queste batterie sono una fonte di
alimentazione ideale per mOway
a causa delle loro piccole dimensioni, leggerezza e flessibilità.
durata della batteria dipende in larga misura sui sensori attivi e la quantità
di
tempo i motori sono utilizzati.
La carica dura circa 2 ore, il sistema di alimentazione controlla due LED situato nella parte posteriore del
robot
Il LED verde indica che mOway è acceso e il LED rosso indica che la batteria
è in carica. Quando la batteria è carica il LED rosso si spegne.

Immagine 17. Carica (rosso) e acceso (verde)
Il modulo RF consente di comunicare con altri robot mOway o con il PC utilizzando RFUsb
 Immagine 18. Modulo RF |
 Immagine 19. RFUsb |
Il modulo RF è collegato tramite il connettore di espansione ed è molto facile da usare con mOwayGUI.
Il modulo di comunicazione a radio-frequenza BZI-RF2GH4 si basa sul
ricetrasmettitore nRF24L01 prodotto da "Nordic Semiconductors". Questo
circuito integrato è stato dotato di tutta la logica necessaria per stabilire
una comunicazione wireless
bidirezionale.
La comunicazioni con il
microcontrollore avviene tramite un bus SPI.
Le principali caratteristiche del modulo BZI-RF2GH4 sono i seguenti:
• Basso consumo.
• Lavoro di frequenza: 2,4 GHz,
• Trasmissione di potenza tra-18 e 0 dBm,
• La velocità di trasmissione tra 1 e 2 Mbps,
• 128 in canali di trasmissione selezionabili tramite il bus SPI.
| Elenco revisioni | |
| 21/03/2011 | Aggiornato pagina |
| 23/02/2011 | Emissione preliminare |



