

ultimo aggiornamento 23 febbraio 2011
|
ultimo aggiornamento 23 febbraio 2011 |
|
|
|
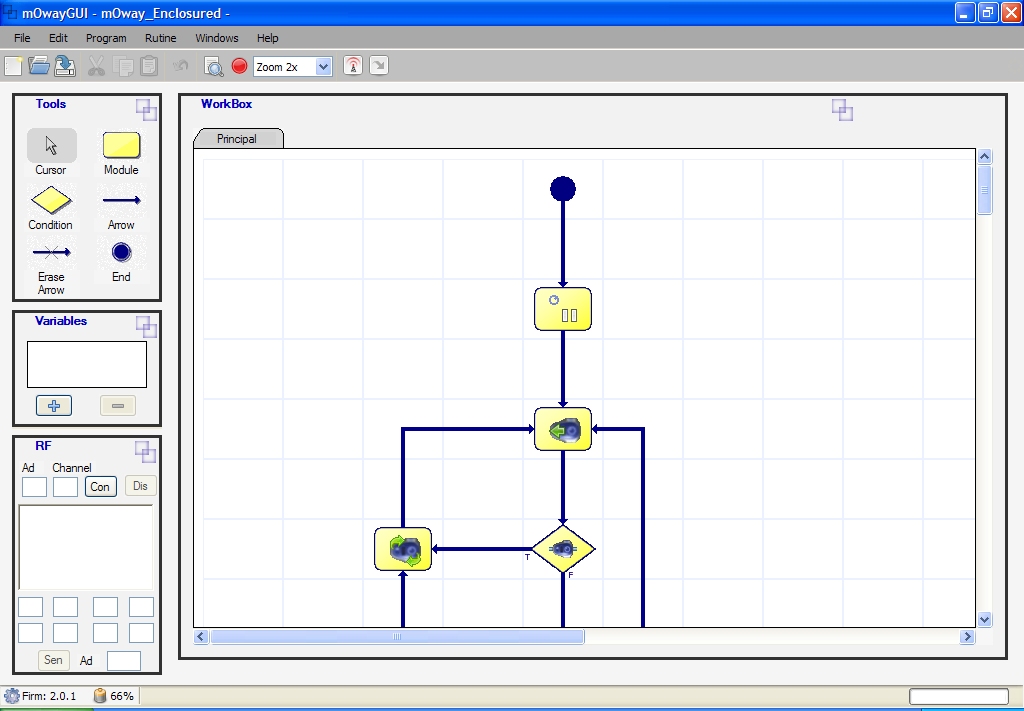
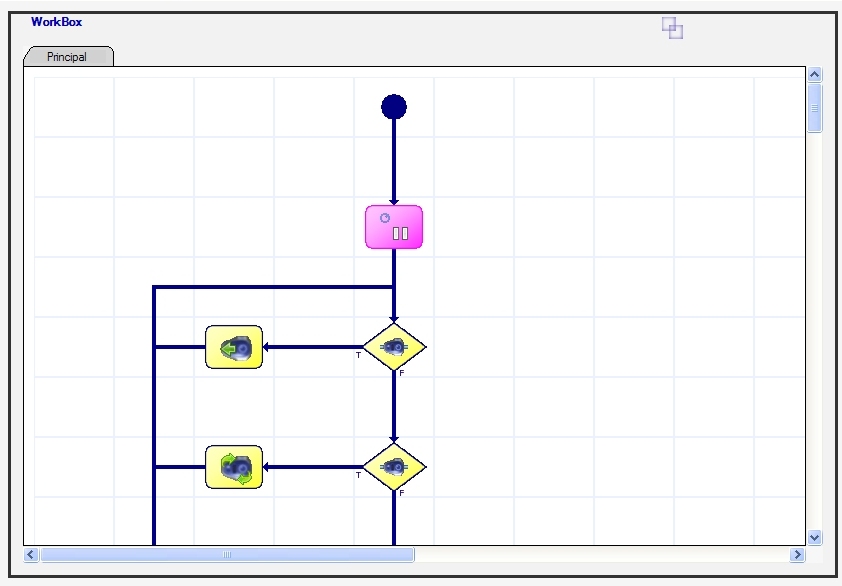
Per la programmazione
di mOway è disponibile un apposito programma denominato mOwayGUI,
questo permette di scrivere il programma e di effettuare il download nella
memoria del robot.
Questa applicazione può effettuare il download di un programma scritto in
assembler (compilato con MPLAB o gputils) e C (Compilatore C18).

La procedura per scaricare un programma per mOway è la seguente:
Collegare mOway al PC tramite USB. Il robot non ha bisogno di driver.
Aprire l'applicazione mOwayGUI.
Aprire o creare un progetto in mOwayGUI, oppure importare un file. HEX file assembler o C del progetto.
Fare clic su tasto download. Se il file HEX file è stato correttamente importato il programma si avvierà automaticamente.
Scollegare il robot e controllare il progetto
Con il programma vengono salvati alcuni programmi di test:
Progetti per controllare sensori:
ASM_SEN_01: Programma in assembler per controllare i sensori. I sensori di ostacolo sono controllati e se un oggetto viene rilevato si accendono i LED e viene emesso un bip, questo progetto utilizza la libreria assoluta lib_sen_moway.inc.
ASM_SEN_02: Programma in assembler per controllare i sensori. I sensori diostacolo sono controllati e se un oggetto viene rilevato si accendono i LED e viene emesso un bip. questo progetto utilizza la libreria rilocabile lib_re_sen_moway.inc.
C_SEN_01: Programma in linguaggio C per controllare i sensori. I sensori ostacolo vengono controllati e se un oggetto viene rilevato si accendono i LED e viene emesso un bip.
Progetto per verificare sistema di azionamento:
ASM_MOT_01: Programma in assembler per controllare sistema di azionamento. Alcuni movimenti di mOway vengono eseguiti. Questo progetto utilizza la libreria assoluta lib_mot_moway.inc
ASM_MOT_02: Programma in assembler per controllare sistema di azionamento. diverso movimenti di mOway vengono eseguiti. Questo progetto utilizza la libreria rilocabile lib_re_mot_moway.inc.
C_MOT_01: software per controllare C18 sistema di azionamento. Diversi movimenti di mOway vengono eseguiti.
Progetti per verificare modulo RF:
ASM_RF_01: Programma in assembler per controllare il modulo RF. Invia i dati tramite il canale 0x40 e 0x02 ogni 2 sec. Questo progetto utilizza la libreria assoluta lib_rf2gh4.inc.
ASM_RF_02: Programma in assembler per controllare il modulo RF. Invia i dati tramite il canale 0x40 e 0x02 ogni 2 sec. Questo progetto utilizza la libreria rilocabile lib_re_rf2gh4.inc.
ASM_RF_03: Programma in assembler per controllare il modulo RF. Trasforma il robot in ripetitore. Ricezione senza interruzioni. Questo progetto utilizza la libreria assoluta lib_rf2gh4.inc.
ASM_RF_04: Programma in assembler per controllare il modulo RF. Trasforma il robot in ripetitore. Ricezione senza interruzioni. Questo progetto utilizza rilocabile lib_re_rf2gh4.inc biblioteca.
C_RF_01: Programma in linguaggio C per controllare il modulo RF. Invia i dati tramite il canale 0x40 canali e l'indirizzo 0x02 ogni 2 sec.
C_RF_02: Programma in linguaggio C per controllare il modulo RF. Trasforma il robot in ripetitore con ricezione senza interruzioni.
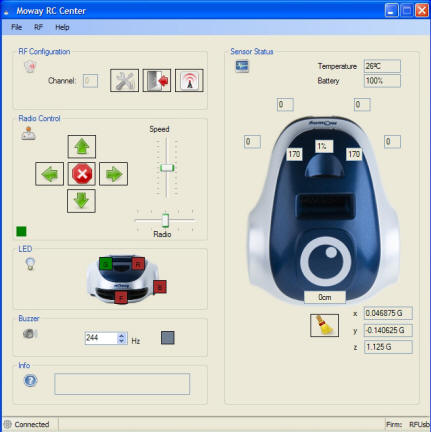
Tramite il programma mOwayGUI è possibile richiamare l'utility Moway RC Center (figura sotto) con cui è possibile comandare tramite il PC dotato della chiavetta USBRF, il robot, da programma è possibile anche la lettura il remoto della temperatura, percentuale di carica della batteria, valori dell'accelerometro e altro ancora.
 |
 |
 |
 |
 |
 |
 |
| Elenco revisioni | |
| 22/07/2011 | Emissione preliminare |

