
ultimo aggiornamento 11 novembre 2009
|
ultimo aggiornamento 11 novembre 2009 |
|
|
|
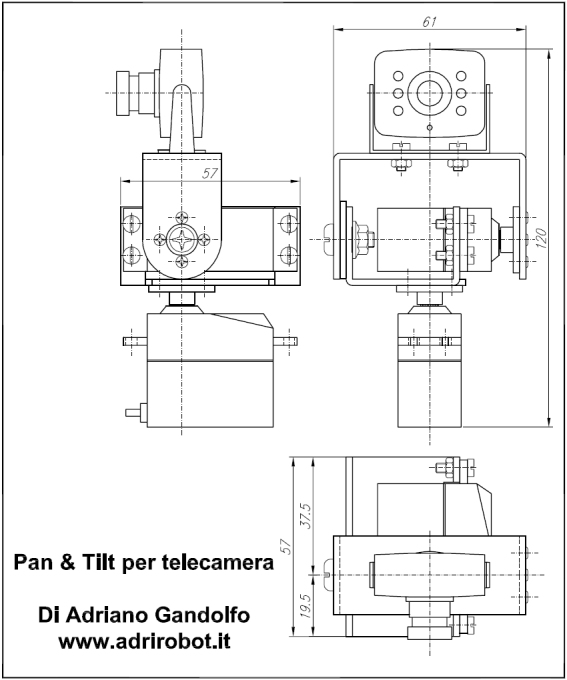
Dopo l'esperienza fatta con la versione
precedente del sistema di Pan & Tilt per telecamera ho pensato di
ridurre le dimensioni del sistema per poterlo utilizzare anche su robot
di dimensioni medio piccole
Ho trovato la soluzione sul sito
www.active-robots.com dove è possibile trovare
anche le
istruzioni per il
montaggio del dispositivo visibile sotto
 Versione originale |
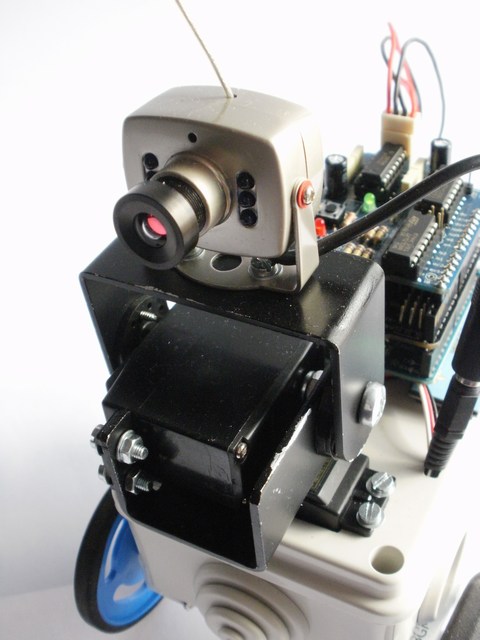
 Progetto da me realizzato |

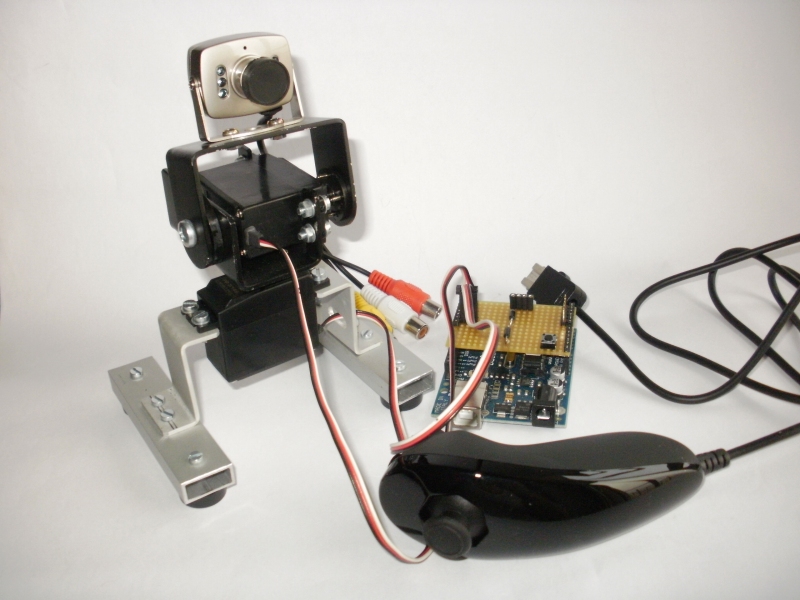
Esempio di comando con Arduino esplora e controller Nunchuck
Utilizzo del dispositivo sul robot ArduinoBot
 |
 |
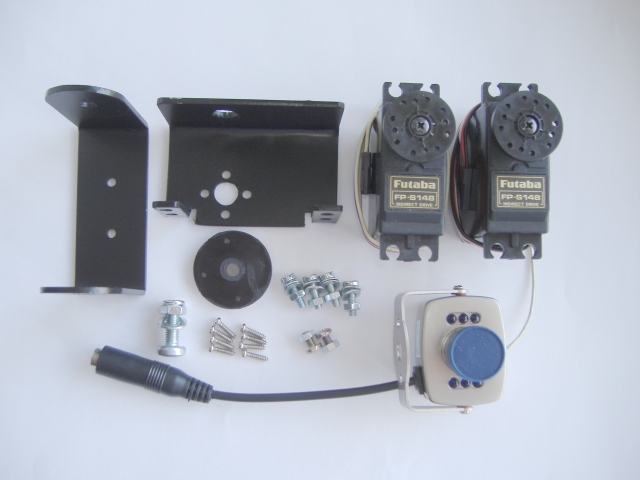
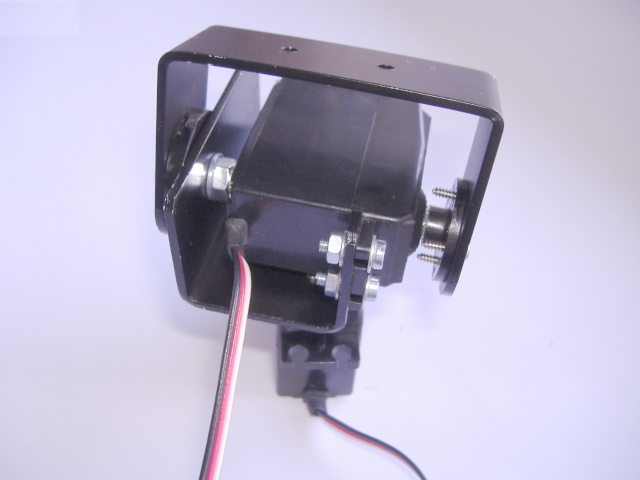
Il suo costo è di 35,35 sterline (circa 50 euro), se invece volete risparmiare potete provare a realizzare il progetto descritto in queste pagine. La struttura è costituita da due particolari (uno in lamiera di ferro, il secondo in alluminio) opportunamente tagliati e piegati. Per la rotazione ho utilizzato dei servo della FUTABA modello S148, mentre la telecamera è una semplice CMOS a colori dotata di trasmettitore incorporato.

Per commenti,
e informazioni aggiuntive
FASI DI MONTAGGIO
 Prima fase di taglio |
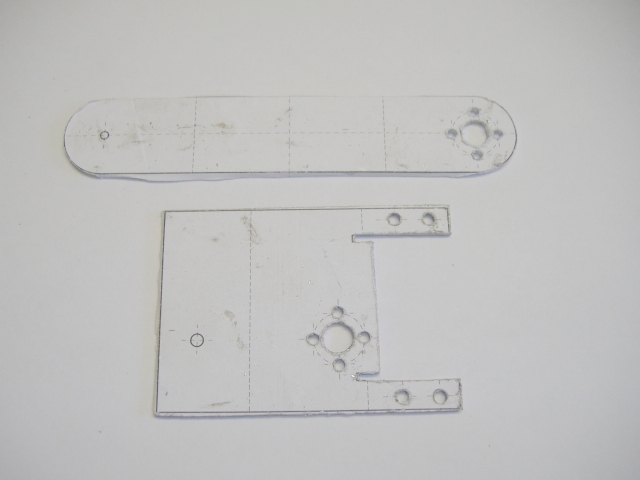 Foratura dei particolari |
 Particolari piegati e pronti per la foratura |
 Particolari verniciati pronti per il montaggio |
 Fissaggio del servo Pan |
 Fissaggio del servo Tilt |
 Dettaglio distanziale per rotazione |
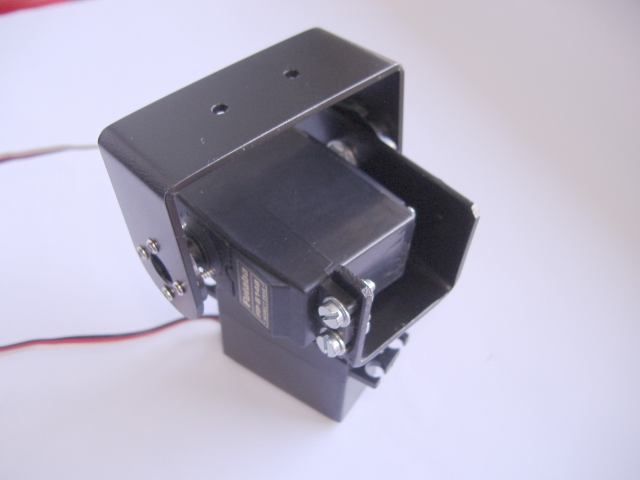 Fissaggio supporto telecamera |
 Dettaglio |
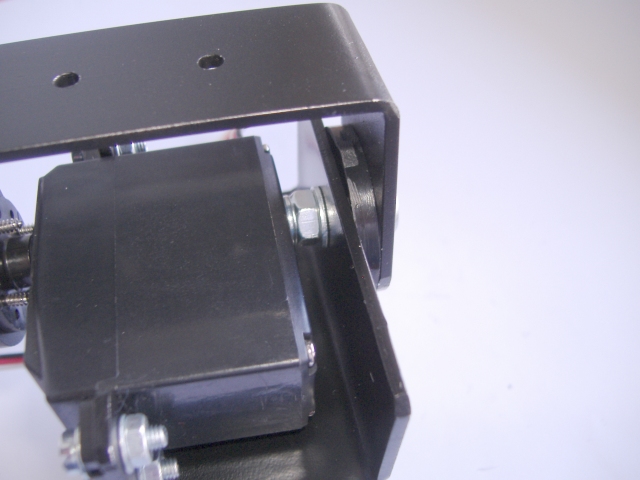 Dettaglio perno di rotazione |
 |
|
|||||||||||||||||||||||||||||
 |
|
||||||||||||||||||
 Ricevitore audio/video |
 Contenuto della confezione |
| Elenco revisioni | |
| 11/11/2009 | Aggiornato pagina, inserito nuovo filmato |
| 17/07/2008 | Emissione preliminare |

