In queste pagine sono
riportate alcune fasi del montaggio del robot, a lato sono visibili
alcuni attrezzi necessari al montaggio.



Particolari necessari alla costruzione
della base del telaio |

Telaio montato |

I due servo forniti con il robot di produzione FUTABA |

Per il montaggio vengono rimosse le
crociere fornite |

Particolari necessari per il fissaggio dei
servomotori al telaio |

I due servomotori montati sul
telaio |

Prossima fase fissaggio del porta batterie
4 batterie tipo AA da 1,5V - 6V totali |

Porta batterie fissato tramite
due viti al telaio del robot |

I cavi dei due servomotori e del cavo di alimentazione
vengono fatti passare attraverso l'apposito foro
previsto sul telaio (protetto da un passacavo in gomma) |

Materiali necessari per la costruzione delle ruote
compreso al sfera posteriore
|

Ruote motrici dotate di elastico per
aumentare il grip |

Dettaglio ruota montata su servomotore |

Dettaglio sfera posteriore |

Vista del telaio con ruote montate |

Telaio con scheda BOE pronta al montaggio |

Scheda BOE montata e spinotto
alimentazione inserito |

Dettaglio processore Basic Stamp 2 |
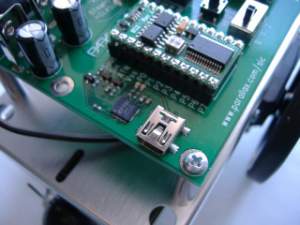
Dettaglio connettore per collegamento USB
per programmazione
processore da PC |

Dettaglio interruttore di accensione
scheda |
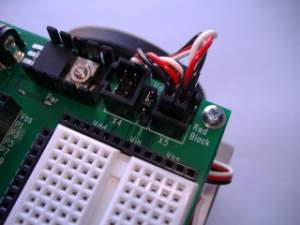
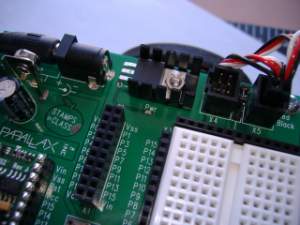
Dettaglio connettori per collegamento
servomotori X4 e X5 |
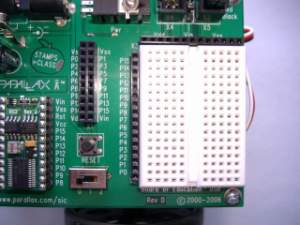
Dettaglio BreadBoard e connettori di interfaccia con il processore |

Dettaglio connettore di alimentazione |
Dettaglio integrato regolatore |
|
Elenco revisioni |
| 14/12/2009 |
Emissione preliminare |
Private Policy
Cookie Policy