![]()
![]()
ultimo aggiornamento 3 marzo 2011
|
ultimo aggiornamento 3 marzo 2011 |
|
|
|
Scheda di alimentazione ed interfaccia
In questa parte della scheda troviamo:
 |
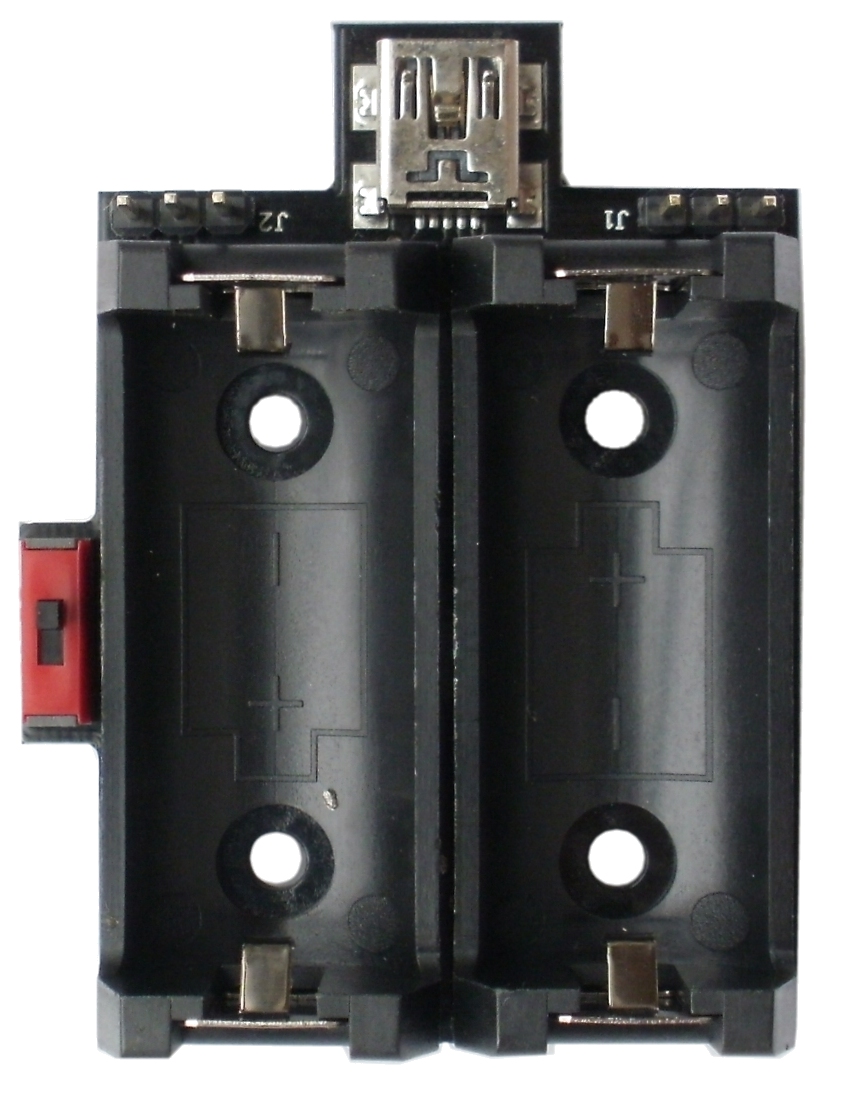 |


Test del buzzer
Questo connettore serve per connettere la
scheda di alimentazione e interfaccia alla
scheda processore tramite un flat-cable.
Nello schema è visibile anche il collegamento del buzzer tramite un condensatore
C4 da 0,1 µF.
Lo stadio di alimentazione è basto sul regolatore di tensione LT1121ACS8-5, che provvede a fornire la tensione di uscita VDD pari a +5V, partendo da quella delle due batterie da 1,5V, nello schema è visibile l'interruttore S3.
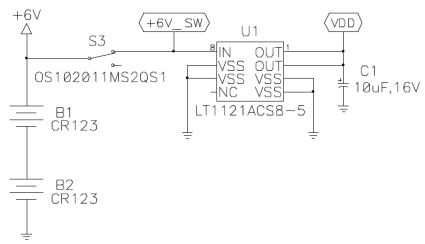
Tensione di Dropout 0.4V
Corrente di uscita 150mA
Nessun diodo di protezione richiesto.
Tensione di uscita fissa a 5V
Limitazione termica
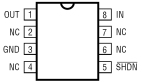
| LT1121-5 Micropower Low Dropout Regulators with Shutdown | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
L'interfaccia USB è basata sull'integrato tipo FT232RL.
 |
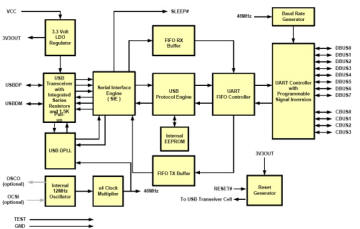 |
| FT232RL USB to RS232 Converter | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
 |
 |
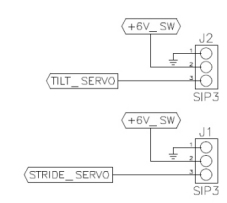
(GWS) Pico Servo di Parallax è più piccolo e più leggero, di un servo standard, ma offre le prestazioni di un servo standard. Questo è raccomandato per i robot più piccoli o in progetti in cui lo spazio è limitato. Il servo può essere controllato direttamente tramite un BASIC Stamp con un solo pin I / O utilizzando il comando PULSOUT.
|
Caratteristiche:
|
Specifiche:
|
| Elenco revisioni | |
| 03/03/2011 | Aggiornato pagina |
| 24/02/2010 | Emissione preliminare |

