![]()


ultimo aggiornamento 21 marzo 2011
|
ultimo aggiornamento 21 marzo 2011 |
|
|
|
Gli obiettivi di progettazione più importanti che sono stati applicati per la realizzazione del robot Scribbler S2 (ora sostituito dal modello Scribbler S2) sono i seguenti:
supporto del processore Propeller P8X32A-Q44 per una vera trasformazione multi-core del robot, che consente ora una varietà di compiti, gestione di sensori non possibili nella versione precedente
Compatibilità con la versione esistente dell'interfaccia di programmazione GUI della precedente versione dello Scribbler
Realizzazione di una "porta hacker" per l'accesso a molti I / O con buona capacità di alimentazione.
Compatibilità con i modelli esistenti in hardware di terze parti, come la Georgia Tech IPRE Fluke
Miglioramenti del sistema di azionamento con feedback delle ruote ruota dotate di encoder, sia delle principali sia di quella di sterzo.

 |
|
 |
| Scribbler | Scribbler 2 | Scribbler 3 |


Ma c'è molto di più, come vedrete nella tabella delle caratteristiche. Il Propeller ha permesso di fornire una piattaforma altamente capace, che apporta nuove capacità. Si consideri l'elaborazione parallela, sintesi vocale e la porta hacker espansa, per non parlare della varietà di linguaggi ora disponibili per la programmazione.
Tabella delle caratteristiche
|
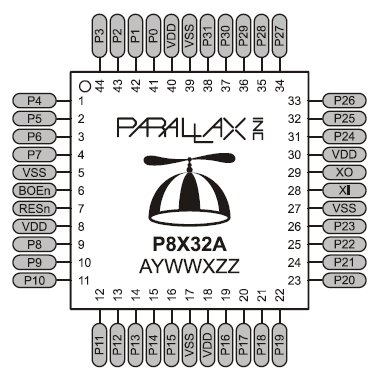
| Processore P8X32A - Propeller | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
Open-Source
Il robot S2 è realizzato secondo la formula open-source. Gli utenti possono liberamente scaricare tutti i file di progettazione: layout PCB, Lista dei materiali i disegni, SolidWorks, montaggi meccanici, il sorgente Perl dell'interfaccia GUI e tutto il codice Propeller.. Gli utenti possono utilizzare l'intera progettazione dei propri prodotti commerciali.
Il Robot S2 è adatto
a una grande varietà di capacità di programmazione. Il Robot Scribbler è
pre-programmato con otto modalità demo che includono la ricerca di sorgenti
luminose, rilevazione di oggetti, evitare ostacoli, seguire una linea e disegnare.
Posizionate un pennarello nell'apposito portapenna e il robot traccerà in base
al proprio spostamento. Successivamente si potranno utilizzate gli strumenti di
programmazione basati sull'interfaccia grafica S2 (S2 GUI), o modificate il
codice sorgente Propeller nel linguaggio Spin del tutto simile al BASIC.
Attraverso l'uso di strumenti esterni, potete, inoltre, programmare l'S2 su
piattaforma Mac o Linux, in PropBASIC e C (le risorse per questi linguaggi
saranno a breve disponibili). L'S2 è pienamente compatibile col Georgia Tech IPRE
Fluke.
L'Interfaccia Grafica Utente S2 è retro-compatibile con l'originale GUI S1.
Tuttavia, i programmatori utilizzeranno Spin per il Propeller al posto di PBASIC,
così come fecero per il BASIC Stamp nella GUI S1. Gli esempi renderanno la
transizione veramente semplice. I benefici e la flessibilità di Spin in sistemi
multi-core forniscono una facile separazione delle subroutine S2 in esecuzione
contemporaneamente con la memoria condivisa.
Il controllo dei motori, la
gestione dei sensori e l'interfacciamento con la porta hacker può essere
effettuato durante l'esecuzione audio; Propeller rende tutto possibile.
Contenuto del Kit:
Scribbler Robot completamente assemblato
Guida Start-Up 'The Scribbler Robot'.
| Elenco revisioni | |
| 21/03/2011 | Emissione preliminare |

