Scheda di controllo
ultimo aggiornamento 16 giugno 2006
|
Scheda di controllo ultimo aggiornamento 16 giugno 2006 |
|
|
|
| La scheda principale
del robot Pathfinder è rappresentata dalla scheda di controllo, su di esso è presente il
chip PIC16F870 prodotto dalla MICROCHIP che
rappresenta il "cervello" del robot Questa scheda viene assemblata con i componenti allegati ai primi 8 fascicoli, mentre PIC16F870 è allegato al fascicolo 40. Sulla scheda è inoltre presente l'integrato MAX232 incaricato delle comunicazioni con il PC con esso otterremo di adattare i livelli di tensione TTL in uscita del microcontroller ai livelli di tensione più elevati che richiede la porta seria le del PC. Troviamo poi l'integrato 40106 e le resistenze che lo accompagnano che formano l'elettronica necessaria per il condizionamento dei sensori ottici modello CNY70, di cui è dotato il robot. |
|
|
 File PDF LABORATORIO PRATICO |
 File PDF COSTRUZIONE DEL PATHFINDER |
|



1 CDROM
1 telaio
1 Circuito stampato
RV501r3/1
2 Resistenze 2,2 kohm
4 Resistenze 47 kohm
4 Resistenze 220 ohm
1 Condensatore 100 nF ceramico
2 Condensatori 27 pF ceramici
1 Regolatore 7805
1 Dado
1 Bullone
2 Condensatore 100 nF ceramico
1 Condensatore elettr. 470 uF 16Vl
1 Condensatore elettr. 100 uF 16Vl
2 Condensatori elettr. 22 uF 16Vl
1 Zoccolo 13x2 femmina x c.s.
1 Connettore maschio 4 poli x c.s.
1 Connettore maschio 2 poli x c.s.
| Fascicolo n°5 | Fascicolo n°6 | Fascicolo n°7 | Fascicolo n°8 |
 |
 |
 |
 |
 |
 |
 |
 |
|
1 Circuito integrato 40106 |
1 Circuito integrato MAX232 |
1 Zoccolo IC 14+14 |
2 Distanziatori 20 mm |
 |
| Scheda di controllo montata lato saldatura |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Schema elettrico della scheda
|
|---|
|
|
|
|
Questa è la scheda di controllo del robot,
essa ospita il microcontroller, cioè il dispositivo che farà di Pathfinder un robot intelligente capace di risolvere i lavori per cui lo programmeremo. Su questa scheda si trova anche l'elettronica necessaria per stabilire la comunicazione con il PC e i circuiti di condizionamento dei sensori ottici. |
|
|
Pathfinder dispone di un microcontroller modello 16F870, (posizionato sullo zoccolo U3, da 28 pin) del costruttore Microchip. L'elettronica necessaria per far funzionare il microcontroller è semplice, richiede solo un'alimentazione da 5 V e la massa, e un circuito oscillatore formato da un cristallo di quarzo Y1 (valore 4 MHz) e da due condensatori C7 e C8 da 27 pF
|
|
|
|
|
I piedini del microcontroller, che serviranno per ricevere i segnali d'ingresso dei sensori e inviare i segnali di uscita per i motori e gli attuatori, sono collegati con il connettore
JP19, da 26 pin. Questo connettore servirà da bus di espansione, e siccome dispone di tutti i segnali del microcontroller, servirà da base per far sì che le altre schede si possano collegare alla scheda di controllo. In questo modo potremo sviluppare la struttura modulare di controllo di Pathfinder.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
In questa figura possiamo vedere lo schema elettronico di una parte della scheda di controllo. In particolare possiamo vedere il microcontroller un PIC16F870 e Il suo circuito oscillatore, e anche i collegamenti fra il microcontroller e il bus di espansione. Notiamo inoltre un condensatore da 100 nF situato In parallelo all'alimentazione d'ingresso del microcontroller, che servirà per stabilizzare la tensione a fronte di possibili disturbi.
|
|
|
Il circuito incaricato delle comunicazioni con il PC si basa su di un circuito integrato MAX232 e quattro condensatori. Con questi elementi otterremo di adattare i livelli di tensione TTL in uscita del microcontroller ai livelli di tensione più elevati che richiede la porta seria le del PC. In questo schema possiamo vedere i collegamenti di questo circuito di comunicazione. I condensatori permettono al chip MAX232 di generare le tensioni di lavoro a ±8 V. Inoltre quest'ultimo ha il compito di codificare i dati del microcontroller per inviarli al PC, e di decodificare i dati del PC per inviarli al microcontroller. Il circuito integrato MAX232 permette di realizzare comunicazioni full-duplex, inviando e ricevendo dati dal PC in modo simultaneo. |
|
|
|
|
|
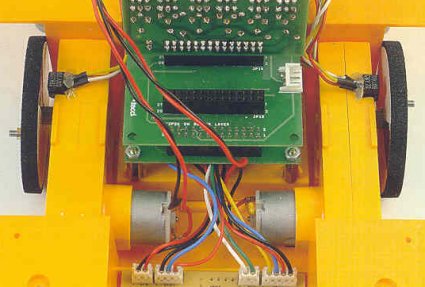
Proseguiamo con l'analisi delta scheda di controllo; nell'immagine sono mostrati due connettori tramite i quali la scheda di controllo comunica con la scheda di alimentazione e i connettori del robot. Tramite questi connettori si ricevono le tensioni di alimentazione per far funzionare tutta l'elettronica del robot, inoltre sono inviati il segnale audio e i segnati di comunicazione con il PC.
|
|||||||||||||||||||||||
|
|
Nell'Immagine possiamo vedere il
regolatore di tensione U1 (integrato 7805) e due condensatori, che hanno il compito di
stabilizzare la tensione di funzionamento del robot. Sotto è visibile lo schema elettrico che formano parte della scheda di controllo. Con questa elettronica si stabilizza la tensione ricevuta tramite il connettore JP1 a un valore di 5 V, adeguato per tutti i componenti elettronici e gli integrati di cui è composto il robot. Questo regolatore di tensione può fornire un'intensità massima di corrente di 1 A. La tensione regolata è applicata solamente all'elettronica di controllo del robot, i motori ricevono l'alimentazione direttamente, senza passare attraverso questo regolatore. |
|
|
|
|
|
 |
Questo connettore
JP5 a due pin, e le resistenze da
2,2 Kohm R1 e R3, sono i componenti necessari per permettere al microcontroller di stabilire
la comunicazione I2C con la memory card, su cui sarà montata la EEPROM. Tramite questo connettore potremo comunicare con la memory card e scaricare i nostri programmi sul microcontroller in modo semplice. Dal valore della resistenza si desume che il clock di I2C deve essere impostato a 400 Khz. Il bus I2C |
 |
|
|
I
quattro connettori mostrati nell'immagine, insieme al circuito integrato 40106
(un integrato in tecnologia C-MOS
costituito da porte NOT triggherate. Queste porte oltre a negare il segnale di
ingresso possono evitare che i disturbi in ingresso possano essere trasmessi all’
uscita) e le resistenze che lo accompagnano, formano l'elettronica necessaria per il condizionamento dei sensori ottici modello CNY70, di cui è dotato il robot. Utilizzeremo questi sensori ottici per diversi scopi , come il controllo del movimento dei piedini di Pathfinder, o per permettere al robot, in assetto da veicolo, di seguire un circuito disegnato sul pavimento.Questa è l'elettronica di condizionamento dei sensori. Fondamentalmente questa elettronica ha il compito di alimentare le due parti del sensore, fotodiodo e fototransistor, e di convertire il segnale ricevuto in un livello logico TTL, adatto al funzionamento del microcontroller. |
|
|
|
|
|

|
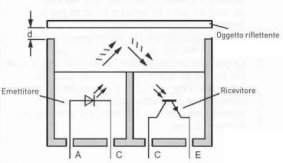
Sensore ottico a riflessione Tipo CNY70 |
|
|
|
Si tratta di uno dei sensori più utilizzati in
microrobotica, dato il suo basso costo, e le sue svariate applicazioni
pratiche. Abitualmente è utilizzato se si si desidera che il robot mobile segua un percorso segnato da una linea sul pavimento. Funzionamento ed utilizzo All'interno della capsula di questo sensore è montato un diodo LED che emette raggi infrarossi, invisibili all'occhio umano. Il diodo è dotato di due terminali, l'anodo (A) ed il catodo (K). Sulla stessa superficie è ubicato un fototransistor che ha la proprietà di condurre corrente fra l'emettitore (E) e il collettore (C), proporzionale alla quantità di luce che incide sulla base. Dato che sia l'emettitore sia il ricevitore dei raggi sono disposti sulla stessa superficie, è necessario che davanti ad entrambi sia presente una superficie riflettente, per fare in modo che il fototransistor possa ricevere i raggi che genera il led. La superficie riflettente deve essere situata a pochi millimetri da quella su cui sono montati emettitore e ricevitore, per far si che i raggi riflessi abbiano sufficiente intensità. |
|||
 |
 |
||
| Foto dei 4 sensore forniti nel corso dell'opera |
Alla
scheda controllo vengono collegati i sensori |
||
 |
 |
 |
 Dimensioni del sensore |
 |
 |
 |
| Posizionamento di 2 sensori CNY70 sulle ruote laterali | Posizionamento di 1
sensori CNY70 sul motore di movimento eccentrico |
 |
| Posizionamento di 2 sensori CNY70 sulla parte frontale per la funzione seguilinea |
| Elenco revisioni: | |
| 16/06/2006 | Aggiornato pagina inserimento file PDF Costruzione e Laboratorio |
| 22/12/2005 | Aggiunto descrizione sensori CNY70 collegati alla scheda, e revisione grafica della pagina |
| 08/06/2005 | Emissione preliminare |