Scheda Sonar
ultimo aggiornamento 25 aprile 2012
|
Scheda Sonar ultimo aggiornamento 25 aprile 2012 |
|
|
|
|
La scheda qui mostrata racchiude i circuiti
per il funzionamento di due tipi di sensori: il primo è formato da una
coppia di capsule ultrasoniche (una trasmittente e una ricevente) che
formano il sensore ad ultrasuoni, il secondo formato da un fototransistor
rappresenta il sensore di luce. Per il montaggio sono necessari i componenti allegati ai fascicoli dal n° 56 al n°65. |
|
|
 File PDF LABORATORIO PRATICO |
 File PDF COSTRUZIONE DEL PATHFINDER |
|

| Fascicolo n°56 | Fascicolo n°57 | Fascicolo n°58 | Fascicolo n°59 | Fascicolo n°60 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
1 Circuito stampato
circuito per sensori cod. RV506r6 |
4 Resistenza 1Mohm |
3 Resistenza 100Kohm |
1 Trimmer 1Mohm |
3 Condensatori 10nF ceramici |
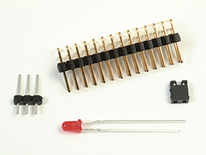
| Fascicolo n°61 | Fascicolo n°62 | Fascicolo n°63 | Fascicolo n°64 | Fascicolo n°65 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
1 Led ROSSO |
2 Connett.maschio 2 poli per c.s. |
1 Circuito integrato 4011 |
1 Trasmettitore ultrasonico |
1 Ricevitore ultrasonico |
Schema elettrico della scheda
 |
|
 Nota: nel mio montaggio anche se non forniti dalla Peruzzo ho utilizzato per il montaggio degli integrati degli zoccoli, contrariamente a come viene richiesto di montarli direttamente sulla scheda. |
|
||||||
|
Schema elettrico emettitore di ultrasuoni |
|
|
| Lo schema dell'immagine forma un circuito oscillatore per l'emettitore degli ultrasuoni. Questo schema si basa su di un circuito integrato multivibratore 4047 e genera un'onda quadra da 40 KHz, che si applica all'emettitore di ultrasuoni. L'integrato 4011 svolge la funzione di amplificatore e condizionatore del segnale. |
|
Schema elettrico ricevitore di ultrasuoni |
|
|
| In questo secondo schema vediamo il circuito di condizionamento per la capsula di ricezione degli ultrasuoni. Si basa su di un amplificatore operazionale LM324N; è composto da quattro stadi, i primi due hanno il compito di condizionare e amplificare il segnate generato da( ricevitore di ultrasuoni, quando vibra sotto l'azione degli impulsi inviati dall'emettitore di ultrasuoni. Gli ultimi due stadi implementano un rilevatore di movimento. In questo modo, quando la capsula di ricezione rileva un movimento, il risultato elettronico sarà uno '0' digitale inviato a RA2. Quando questo succede, si illuminerà anche il diodo LED D3. |
|
|
La scheda dei sensori dispone del jumper JP3, con cui potremo configurare due modi di funzionamento. Se il jumper si trova nella stessa posizione rappresentata dell'immagine il circuito di emissione di ultrasuoni starà funzionando in modo continuo, quindi potrà essere rilevato qualsiasi movimento dinanzi al robot. Se il jumper è sulla posizione contraria, l'emettitore di ultrasuoni funzionerà solamente quando sul piedino RA1 del microcontroller verrà inviato uno '0' logico. Grazie ad esso potremo implementare nuove applicazioni. |
|
|
|
|
Il sensore di Luminosità della scheda dei sensori si basa su un fototransistor. Il circuito di condizionamento è semplice, dispone di una resistenza sul collettore da 10 KW collegata a 5 V; l'emettitore del fototransistor è collegato a massa. Quanta più Luce incide sulla base del fototransistor, maggiore sarà la conduzione elettrica fra emettitore e collettore. Per questo motivo quando la Luminosità sarà nulla, il segnale inviato
al microcontroller tramite RA0 sarà di 5 V e per la massima luminosità
il segnale tenderà a 0 V. A differenza del resto dei sensori del robot il sensore di luminosità è un sensore analogico: il segnale inviato da RA0 non disporrà dei due valori, "1" e "0” logico, ma di qualsiasi valore compreso fra 0 e 5 V. Quando la scheda dei sensori viene inserita sulla scheda di interfaccia, il fototransistor rimarrà nella zona superiore del robot, in modo da poter captare perfettamente la luce ambientate. |
|
|
|
|
| In questa immagine possiamo vedere l'ultima parte dello schema della scheda dei sensori. Si tratta del connettore JP4, che servirà per il. collegamento delta scheda dei sensori atta scheda di interfaccia. Su di esso passano i segnali di alimentazione da 5 V necessari per l'elettronica Si implementano anche i tre pin di comunicazione con il microcontroller: RA0 è il. pin che riceve il segnale analogico del sensore di luminosità, RA1 controlla l'attivazione e l'arresto della capsula di emissione degli ultrasuoni e RA2 è la ricezione del segnale di risposta degli ultrasuoni. | |
|
|
Le capsule a ultrasuoni si collegano alla scheda dei sensori tramite i connettori femmina JP1 e JP2. La capsula di ricezione verrà collegata a JP1 e quella di emissione a JP2. Le capsule a ultrasuoni possono rimanere collegate alla scheda anche quando al loro posto si utilizzano i finecorsa. Il fototransistor D6 non ha bisogno di connettori, dato che è saldato direttamente sulla scheda dei sensori. |
 |
Nella parte anteriore del telaio di Pathfinder troviamo due alloggiamenti specifici per l'inserzione delle capsule a ultrasuoni. E’ importante che queste capsule siano separate fra loro di alcuni centimetri, che siano ben allineate e che guardino in avanti. Se collochiamo in questa posizione le capsule a ultrasuoni, qualsiasi movimento dinanzi al robot sarà rilevato dalla scheda dei sensori. |
|
|
Nella scheda di interfaccia di Pathfinder c'è un commutatore molto importante, SW2. Se questo commutatore è posizionato come mostra
nell'immagine, il segnate digitale inviato dalla scheda dei sensori verso il microcontroller sarà abilitato. Se al contrario, il commutatore si trova nella posizione opposta, abiliteremo i finecorsa. In questo modo il robot potrà funzionare con gli ultrasuoni oppure con i finecorsa, e la selezione dell'uno o dell'altro metodo si realizza tramite il commutatore SW2 della scheda di interfaccia. |
|
Collaudo Per collaudare la scheda il primo passo consiste nel collocare la scheda nella sua posizione corrispondente sulla scheda di interfaccia. Dovrà essere collegata al connettore JP16. Il sensore di ricezione a ultrasuoni (40R) sarà collegato al connettore JP1 della scheda dei sensori, e la capsula di emissione degli ultrasuoni (40T) sul connettore JP2 detta stessa scheda. A questo punto per avere il modulo a ultrasuoni continuamente attivato, posizioneremo il jumper JP3 in modo che siano cortocircuitati i pin 1 e 2 , in questo modo circuito oscillatore della scheda dei sensori rimarrà costantemente attivo e la capsula di emissione genererà il segnale. Il passo successivo consisterà nell'alimentare il robot, cosa che faremo tramite la scheda di alimentazione. Possiamo utilizzare un insieme di pile collegate nel portabatterie di Pathfinder, però per le fasi di prova è consigliatile utilizzare un alimentatore esterno in continua. Le capsule a ultrasuoni devono essere posizionate nella parte anteriore del telaio del robot, nelle sedi predisposte a questo scopo. In questo momento la scheda dei sensori sta funzionando come un rilevatore di movimento; per verificare i funzionamento dei sensori, faremo muovere qualcosa davanti alle capsule a ultrasuoni, ad esempio la mano. Ogni volta che il circuito a ultrasuoni rileva del movimento davanti alle capsule, si illuminerà il diodo LED D3 della scheda, che si spegnerà quando il movimento cessa. Il potenziometro R8 della scheda a ultrasuoni permette di regolare la distanza di rilevamento; possiamo ruotare il potenziometro a destra o a sinistra per verificare le soglie massime e minime di rilevazione di movimento dei sensori a ultrasuoni. Per ruotare il potenziometro utilizzeremo un piccolo cacciavite a taglio. |
|
|
|
Circuito stampato |
Scheda di controllo montata lato saldatura |
 |
 |
| Elenco revisioni | |
| 25/04/2012 | Aggiornato pagina |
| 16/06/2006 | Aggiornato pagina inserimento file PDF Costruzione e Laboratorio |
| 09/09/2004 | Emissione preliminare |