Braccio robotizzato
Di Stefano Belloli
ultimo aggiornamento 28 settembre 2013
|
Braccio robotizzato |
|
|
|
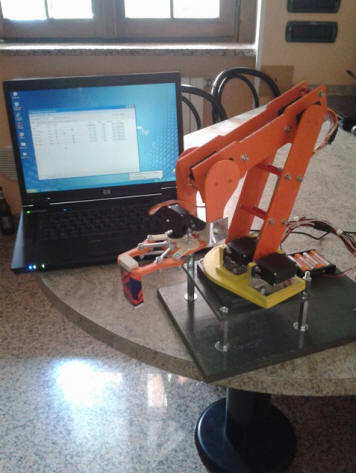
Salve mi chiamo Stefano Belloli, e quello presentato è il mio progetto per la costruzione di un braccio robotizzato capace di eseguire una sequenza di movimenti attraverso l’ausilio di servomotori collegati ad una scheda elettronica, da me programmata.

Il progetto è stato oggetto della mia Tesina di Maturità per l'anno
scolastico 2012-213 presso l'istituto
I.I.S. A. Badoni di Lecco
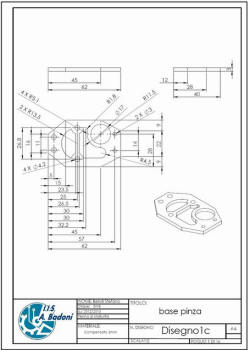
Prima di tutto sono partito dal creare uno schizzo di questo progetto su fogli
di carta, per poi passare alla realizzazione virtuale di esso attraverso il
computer prima in due dimensioni e poi in tre dimensioni con programmi CAD (solidworks).
 |
 |
Una volta ultimate le misure e controllate tutte le parti sono passato alla
realizzazione fisica dei componenti, ed al loro assemblaggio.
Non avendo a disposizione attrezzature atte alla lavorazione dei metalli, ho
deciso di realizzare il mio prototipo con materiali disponibile e lavorabili con
mezzi ed attrezzi di cui dispongo a casa.
Il materiale da me scelto per la realizzazione di questi ultimi è il legno, sia
per una questione di leggerezza, essendo un modellino sia per una questione di
lavorabilità di questo tenero materiale con attrezzature semplici.
I servomotori utilizzati sono dell’azienda produttrice DFROBOT, la scheda
di gestione è dell’azienda POLOLU tutto il resto del materiale è stato
recuperato da quanto disponibile.
SCHEDA DI DI CONTROLLO MICRO MAESTRO DELLA POLOLU
|
||||||||||||
MATERIALI UTILIZZATI
Come prima scritto,
sono stati utilizzati dei materiali che possedevo disponibile in casa con
l’aggiunta di servomotori e schede elettroniche acquistate per l’occasione.
Per la realizzazione della base e della parte inferiore del piede ho utilizzato
un legno con le seguenti caratteristiche: Legno MDF, spessore adeguato alle
funzioni da svolgere, densità elevata (per avere una maggiore stabilità sul
sistema.).
Per la realizzazione del piede, del braccio, del polso e della pinza ho
utilizzato del compensato leggero per evitare di dover acquistare grossi
servomotori .
Per la movimentazione ho acquistato dei servomotori con caratteristiche
differenti a seconda della funzione che doveva svolgere.
Per la gestione del sistema ho scelto una scheda a microprocessore in grado di
gestire fino a sei movimenti

FUNZIONAMENTO PROTOTIPO
Il braccio robotico costruito si può muovere su cinque assi con l'ausilio di servomotori:
Movimento della base del braccio (rotazione);
Movimento del piede (avanti/indietro)
Sollevamento del braccio (salita/discesa);
Movimento del polso (salita/discesa),
Gestione della pinza di presa (apertura/chiusura).
Attivando il comando
PLAY da PC, si attiva la sequenza che in precedenza è stata studiata, sia nei
movimenti, nelle posizioni e nei tempi di reazione, conseguentemente
implementata nel processore di ciclo.
La sequenza di ciclo è stata realizzata non con l’ausilio di sensori ma con
sequenza temporale, attivazione di tempi (ogni movimento è gestito da un tempo,
così pure le pause di attesa o stabilizzazione del sistema.)
Ogni sequenza permette il solo movimento della parte interessata.
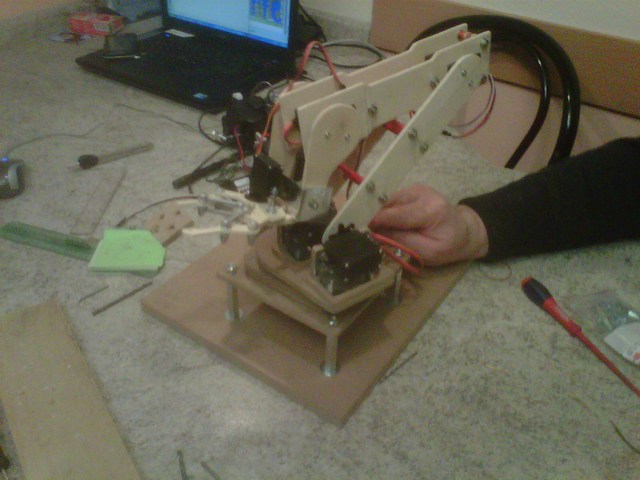
ALCUNE DELLE FASI DI COSTRUZIONE
|
||||||||||||||||
| Elenco revisioni | |
| 28/09/2013 | Emissione preliminare |