Braccio robotizzato
Di Luca Giangravè
ultimo aggiornamento 28 settembre 2013
|
Braccio robotizzato |
|
|
|
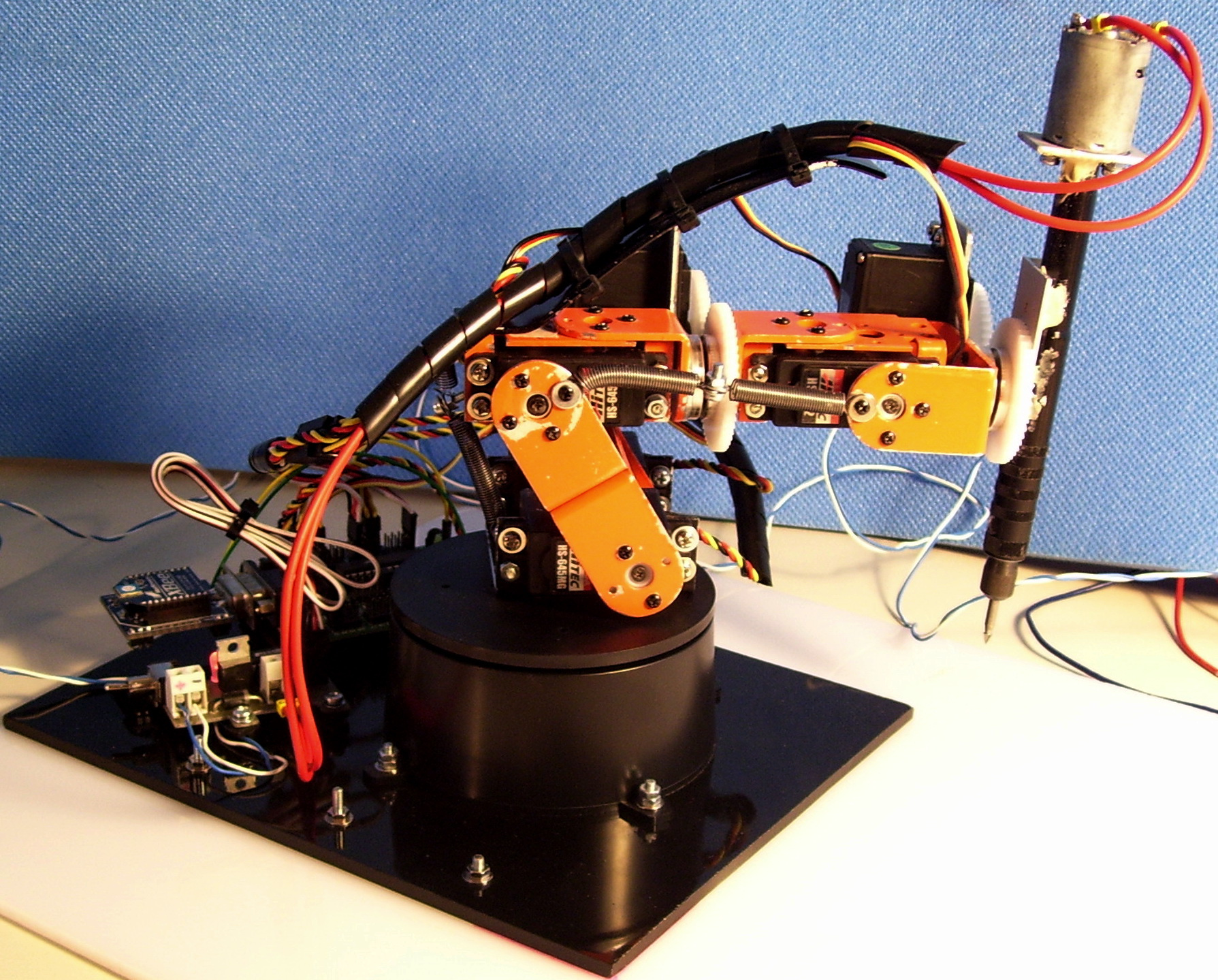
Salve, mi chiamo Luca Giangravè e questo è il robot
da me realizzato. E' un 6 assi ed
è l'unico nel suo genere, dato che non è stato concepito prendendo spunto da
progetti già in circolazione.
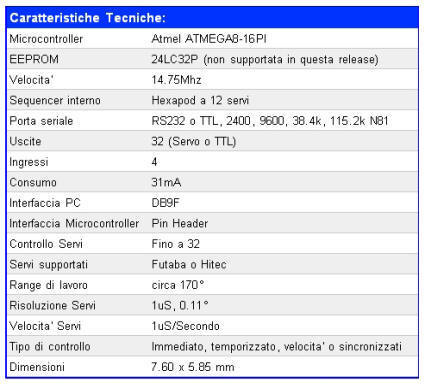
La scheda che lo controlla è una
SSC-32
 |
 |

La comunicazione tra il computer e la scheda avviene serialmente tramite la scheda WIRE
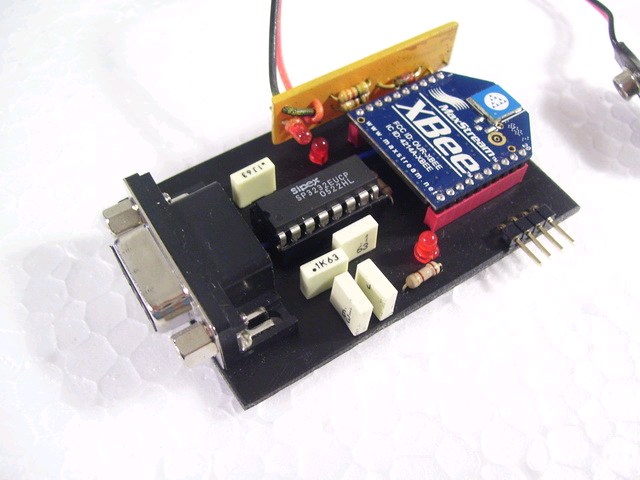 |
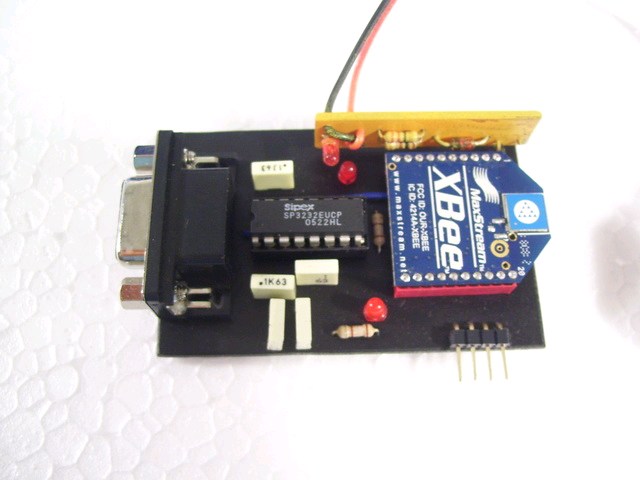 |
o semplicemente tramite cavo. La WIRE è una scheda realizzata tempo fa da me che permette di effettuare comunicazioni wireless, ed è basata su un modulo Xbee. I 6 assi sono azionati da 7 servi, 4 Hitec HS-645MG (1 per la base,2 per l'asse2 e 1 per l'asse3) e 3 Hitec HS-422 (1 per i restanti 3 assi).
 Servo Hitec HS422 |
 Servo Hitec HS645MG |
Questo braccio robot è nato al solo scopo di riprodurre, il più fedelmente
possibile, pezzi disegnati al computer e in questo ha già avuto un buon
risultato data la sua modesta precisione di +-0,03mm, spero migliorabile in
futuro, ma a causa della sua poca stabilità non è in grado di lavorare con
materiali eccessivamente duri.
Le “lavorazioni” sono fattibili grazie al mandrino del robot formato da una
staffa su cui è montato la parte terminale di un albero flessibile per dremel
modificato per funzionare con un semplice motore DC.
Questa staffa consente una veloce sostituzione del mandrino permettendo ad
esempio il montaggio di una pinza, di un laser o di un elettrodo per saldare.
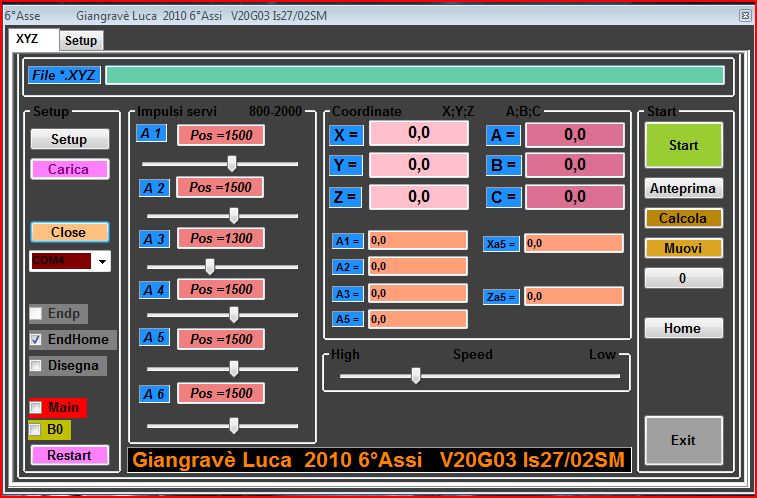
Il software di controllo è stato interamente realizzato utilizzando Visual
Basic;
la sua funzione primaria è quella di effettuare il calcolo di quanto si
deve muovere per raggiungere una data coordinata,
identificata da XYZ, che viene letta in un apposito file generato da un' altro
mio software capace di convertire disegni realizzati in AutoCad in coordinate.
Il software è tutt'oggi in sviluppo pertanto alcune delle funzioni secondarie
sono ancora inattive; è comunque in grado di comunicare con la scheda
SSC-32
usando una porta COM a scelta e può cambiare lo 0 relativo del robot
permettendo il posizionamento del pezzo in qualsiasi punto del banco senza tener
conto dello 0 assoluto.
Il programma è anche strutturato in modo da permettere la gestione di altri
robot simili a questo caricandone semplicemente le caratteristiche (come la
lunghezza degli assi, la posizione dei servi ecc....).Questa funzione non è
stata ancora sperimentata se non nella simulazione al computer.
Alcune foto del prototipo
 |
 |
Foto della versione definitiva
 |
|
 |
 |
| Elenco revisioni | |
| 01/04/2010 | Aggiornato foto del braccio, nella versione definitiva |
| 26/02/2010 | Aggiornato pagina |
| 24/02/2010 | Emissione preliminare |