![]()
![]()
ultimo aggiornamento
27 gennaio 2012
|
|
|
|
|
Come aggiornare il Firmware di ROBONOX
Il firmware in genere è un programma che
è permanentemente installato nel sistema,
solitamente nella ROM (Read Only Memory - memoria a sola lettura).
A
differenza del software, il firmware non può essere alterato
dall’utente, in quanto (a meno che risieda su una EEPROM) richiede
modifiche o sostituzioni dell’hardware.
Nel caso di Robonox questo è aggiornabile.
Questo è necessario in quanto aggiorna un bug riscontrato, sull’ inserimento di
movimenti diversi da M0 in uno
scenario, ovvero, un movimento, esempio M4, non viene eseguito nello
scenario anche se incluso.
La versione disponibile è denominata:
rk01v111.mot.
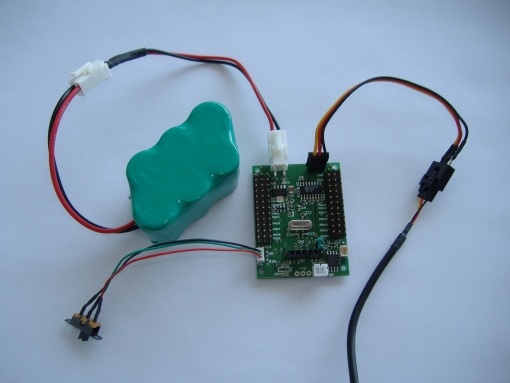
Per effettuare l’aggiornamento del Firmware su ROBONOX, è necessario
prima di tutto realizzare uno speciale
adattatore, richiesto dal software
FlashSta.exe, un tool Renesas
per programmare via seriale, la memoria Flash interna al
processore
M30260F6AGP#U5-A
| Processore M30260F6AGP#U5-A | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
Costruzione dell'adattatore
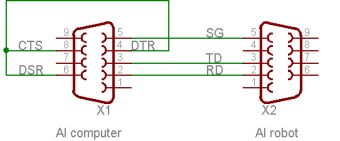
Per realizzare l'adattatore si dovrà
seguire il cablaggio come da schema
X1 è un connettore DB9 Femmina e va al PC
X2 è un connettore DB9 maschio e va al cavo Seriale connesso al Robot


 Dettaglio del connettore lato PC |
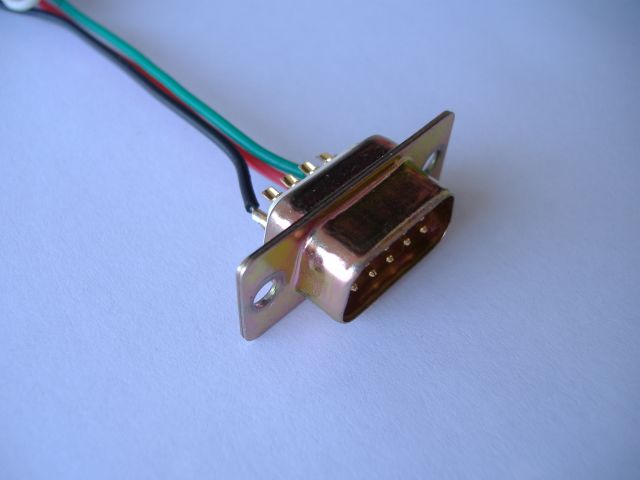 Dettaglio del connettore lato Robot |
|
Procedura per l'aggiornamento
Personalmente ho eseguito l'aggiornamento prima di collegare la
scheda al robot.
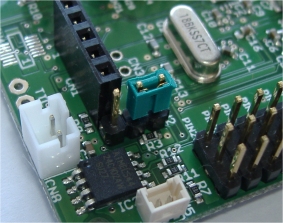
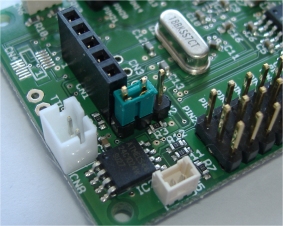
A questo punto a scheda spenta ho inserito il jumper come figura sottostante
Ho copiato la cartella FLASH_ROBONOX da CD nella directory
principale del Hard Disk.
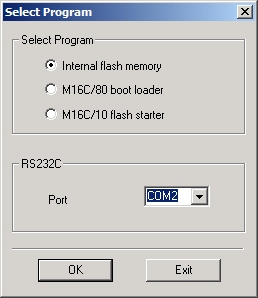
Ho selezionato ”Internal flash memory” e ho scelto la porta a cui è collegato il cavo al robot (nel mio caso COM2), ho quindi premuto OK. Possibili finestre di errore in caso di porta sbagliata o scheda spenta
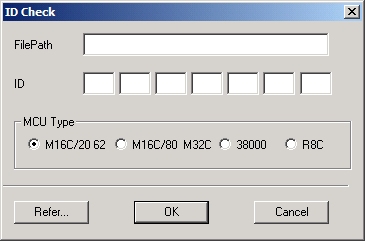
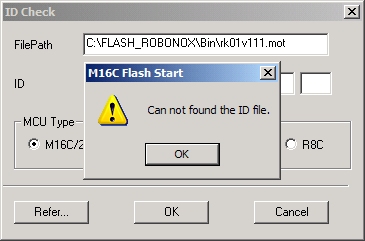
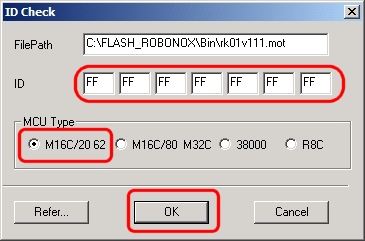
Appare la seguente finestra da dove caricare il file
binario
Premere OK nella finestra di errore ed immettere nei campi ID i 7 valori : FF
Selezionare il tipo di MCU (M16C/20) e premereOK
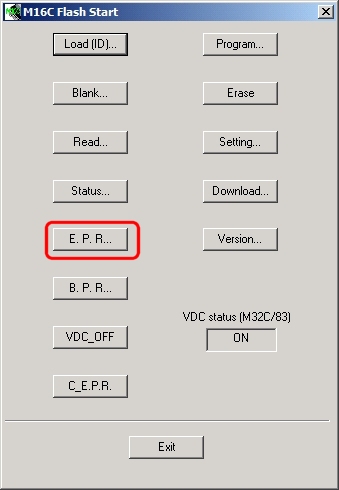
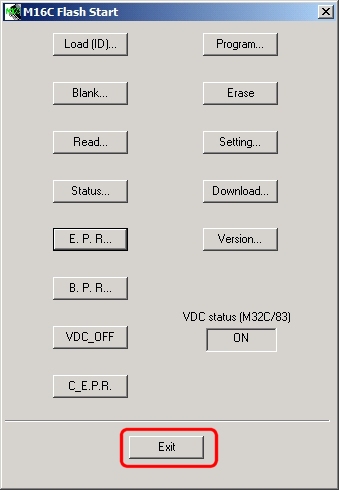
A questo punto premere il pulsante E.P.R. per avviare la procedura di cancellazione, scrittura e verifica
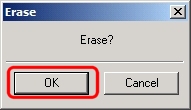
Nella finestra di cancellazione premere OK
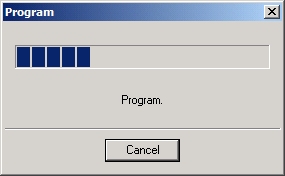
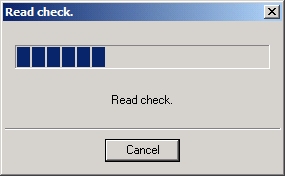
Attendere durante la fase di scrittura del programma
Premere OK al termine della verifica, a questo appunto si tornerà alla finestra del programma principale
Premere il pulsante Exit per uscire dal programma FlashSta. L’aggiornamento è stato realizzato
|
PIN DEL CONNETTORE RS232
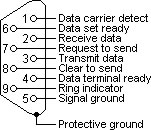
| 1 | CD | Data Carrier Detect. Rilevato modem remoto possibile comunicare |
IN |
| 2 | RD | Received Data Dati in ingresso |
IN |
| 3 | TD | Transmitted Data Dati in uscita |
OUT |
| 4 | DTR | Data Terminal Ready. DTE connesso /DTE pronto a comunicare |
OUT |
| 5 | SG | Signal Ground Massa di segnale |
|
| 6 | DSR | Data Set Ready. DCE connesso /DCE pronto a comunicare |
IN |
| 7 | RTS | Request To Send. Richiesta collegamento /DTE può trasmettere |
OUT |
| 8 | CTS | Clear To Send. DCE pronto a ricevere / DTE può trasmettere |
IN |
| 9 | RI | Ring Indicator. Ricevuto segnale acustico sul canale |
IN |
![]()
Istruzioni per aggiornamento
originali
|
Aggiornamento firmware Contenuto totale della cartella FLASH_ROBONOX |
Programma Flashsta.exe |
file rk01v111.mot |
| Elenco revisioni | |
| 27/01/2012 | Aggiornato pagina |
| 08/04/2008 | Emissione preliminare |