![]()

ultimo aggiornamento 27 gennaio 2012
|
ultimo aggiornamento 27 gennaio 2012 |
|
|
|
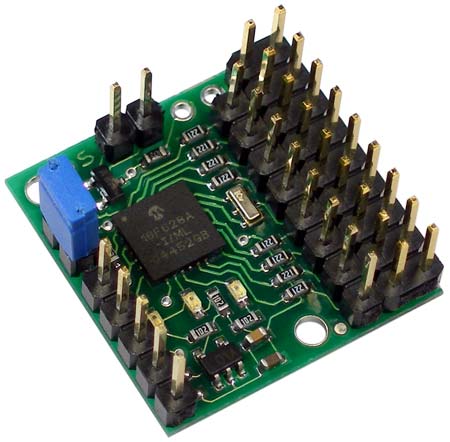
In attesa della fornitura della scheda di controllo per il robot Robonox, si possono fare alcuni esperimenti utilizzando la scheda Micro serial servo controller della Pololu che può essere trovata sul sito Robot-Italy

|
|
Rivista
n° 297 in edicola nel
mese di Marzo 2010 nella sezione Progettare e costruire, titolo
dell'articolo
Controller
per servo e sensore PIR
, inerente il
Serial Servo Controller della Pololu
e un sensore di
tipo PIR. Vengono illustrati il loro funzionamento in rapporto alla scheda con processore Basic Stamp 2 SX e Cubloc CB220.
|
| Specifiche Tecniche : | |
| Tensione Alimentazione | 5-16V |
| Consumo | 5 mA |
| Risoluzione | 0.5 ms (0.05 gradi circa) |
| Ampiezza impulsi | 0.25 - 2.75 ms |
| Numero di porte Servo | 8 |
| Tensione I/O | 0 e 5 V |
| Velocità seriale | 1200 - 38400 (autodetect) |
| Dimensioni | 23.1 x 23.1 mm |
Questa è estremamente compatta (misura
soltanto 23.1 mm di lato!) e può controllare fino
a 8 servocomandi tramite un PC connesso porta
seriale.
Nonostante le sue minuscole dimensioni è ricco di
funzioni.
Può controllare la velocità e la posizione di
ognuno degli 8 servi indipendentemente, la
velocità della porta seriale è rilevata
automaticamente nel range da 1200 a 38400 Baud e
diversi moduli possono essere utilizzati sulla
stessa linea seriale per controllare fino a 128
servi.
I 3 LED di stato e un convertitore di livello
seriale (RS232 -> TTL) costituiscono una soluzione
rapida ed efficace al problema di controllo dei
servi.
Questo servo controller supporta due protocolli di
comunicazione differenti.
La scheda è compatibile con lo standard del Mini
SSC II , è quindi possibile utilizzare tutti i
programmi e le utility sviluppate per questo
standard.
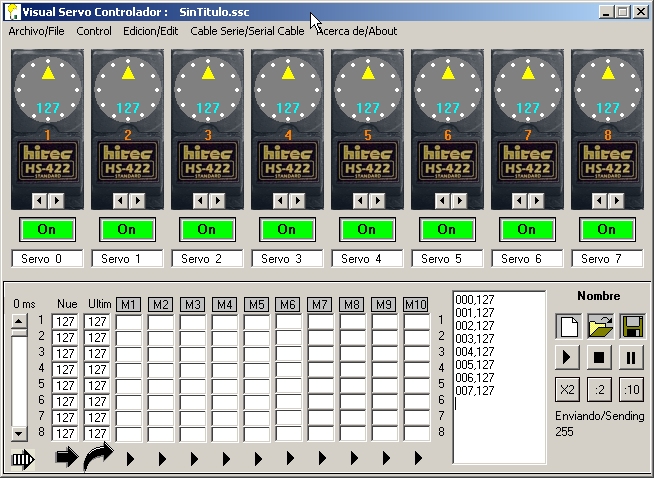
Visual Servo Controlador è un programma di
controllo per servo totalmente gratuito che vi permette di controllare 128
servo differenti. Il programma è totalmente compatibile con il S310165
Controllore di 8 Servo SCC e anche del S310170 Controllore di 12 Servi.
Il programma è facile da utilizzare grazie alla sua interfaccia 100%
grafica.
Uno dei punti forti del programma è la sua capacità di creare dei movimenti
complessi col l'aiuto di un editor di 10 memorie che permette di ripetere la
sequenza più volte sino a trovare il movimento desiderato.
Altra caratteristica interessante è la sua capacità di creare movimenti
fluidi e
proporzionali generando tutte le istruzioni tra due punti indicando solo il
punto iniziale e finale.
Questa caratteristica risulta utile specialmente nel caso di bracci robotici
e robot che
Tutte le istruzioni di controllo possono essere salvate in un file per
essere recuperate in qualsiasi momento.
Il programma è capace di controllare 128 servi
di qualsiasi forma e include aiuti come numero del servo limite massimo e
minimo, arresto, etc che possono essere salvate su disco del PC per essere
recuperate in qualsiasi momento.
Il programma include anche funzioni per aumentare o ridurre la velocità di
riproduzione dei programmi, come funzioni di taglia e incolla su porzioni di
codice.
Il programma è stato scritto da Pablo Pompa per
il sito www.SuperRobotica.com
(pablo@superrobotica.com ) è
di uso gratuito.
Il programma funziona con Windows 98, ME, 2000 e XP e necessita di una porta
seriale Com1 o Com2.
Per installare il programma basta scaricarlo e decomprimerlo in una
directory ed eseguire il file 'Setup.exe'.

| Elenco revisioni | |
| 27/01/2012 | Aggiornato pagina, Inserito riferimento articolo rivista Fare Elettronica n° 297 |
| 08/10/2007 | Inserito descrizione del programma di gestione |
| 10/09/2007 | Emissione preliminare |