![]()
![]()

ultimo aggiornamento
6 giugno 2007
|
|
|
|
|
Allegato al
fascicolo n° 10 troviamo la prima scheda di controllo del motore del
servomotore.
Questo piccolo modulo, le cui
misure come area PCB sono di circa 15 x 16,7 mm, racchiude tutto il
necessario per controllare e posizionare il
motore elettrico
Mabuchi.
E realizzato in tecnologia SMT (Sourface Mounting Assembly) con componenti a
montaggio superficiale e tali misure ridotte si sono ottenute saldando su
entrambi i lati i componenti necessari.
Ciascun modulo è testato singolarmente e non e necessario effettuare alcuna
saldatura, cavetti inclusi
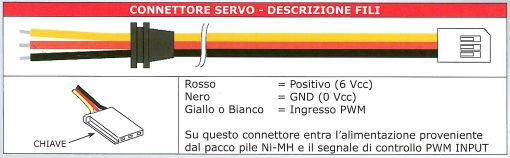
Il piccolo connettore Femmina a 3 poli (di colore bianco nella foto) andrà
collegato al motore elettrico, Il potenziometro (di colore nero) per
rilevare l'angolo di posizione e già montato sul circuito stampato, pronto
nella sede opportuna del contenitore.
|
|
|

 Circuito stampato (lato bottom) |
 Circuito stampato (lato top) |
Caratteristiche integrato servo motor controller
Per il pilotaggio del motore
del servomotore è utilizzato
l'integrato NJM2611 prodotto dalla
New Japan Radio
Co. Ltd.
L'integrato NJM2611 può essere
utilizzato in servomotori o circuiti radiocontrollati. Lavora con un ampio
campo di tensione. Al suo interno è presente un circuito che mantiene
costante la tensione stabilizzando eventuali fluttuazioni causate dalla
fonte di tensione (batterie) e la temperatura ambiente.
Caratteristiche
Tensione di alimetazione: compresa tra 2.5 e 10 V
dead Band impostata internamente: 4uS
Circuito di uotput a transistor NPN
Circuito interno di regolazione della tensione
Realizzato in tecnologia bipolare
Package DMP16 - DIP16
(DMP16 è quella utilizzata per la scheda Robonox)
![]()
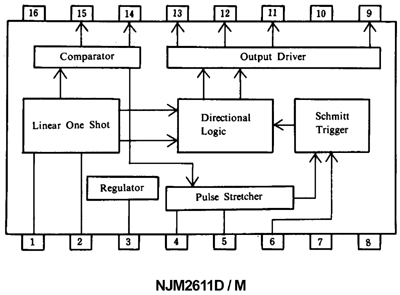
Schema a blocchi dell'integrato

Schema elettrico della scheda di controllo
|
Posizione |
Descrizione |
Valore |
Tecnologia |
Contenitore |
Note |
|
C1 |
Condensatore Ceramico |
0.01µF |
SMD |
0603 |
|
|
C2 |
Condensatore Ceramico |
0.01µF |
SMD |
0603 |
|
|
C3 |
Condensatore Tantalio |
0.1µF/35V |
SMD |
3216 A |
CASE A |
|
C4 |
Condensatore Tantalio |
0.1µF/35V |
SMD |
3216 A |
CASE A |
|
C5 |
Condensatore Ceramico |
0.1µF |
SMD |
0603 |
|
|
C6 |
Condensatore Tantalio |
0.1µF/35V |
SMD |
3216A |
CASE A |
|
C7 |
Condensatore Tantalio |
22µF/16V |
SMD |
3528 |
CASE B2 |
|
CS |
Condensatore Ceramico |
1000 pF |
SMD |
0603 |
|
|
D1 |
Diodo |
SMD |
SOD-80 |
MINI MELF |
|
|
D2 |
Diodo |
SMD |
SOD-80 |
MINI MELF |
|
|
Q1 |
Transistor PNP |
SMD |
SOT-89 |
|
|
|
Q2 |
Transistor PNP |
SMD |
SOT-89 |
|
|
|
U1 |
Servo Motor Controller |
SMD |
MAP-16 |
|
|
|
R1 |
Resistenza |
270KΩ |
SMD |
0805 |
|
|
R2 |
Resistenza |
100 Ω |
SMD |
0805 |
|
|
R3 |
Resistenza |
39KΩ |
SMD |
0603 |
|
|
R4 |
Resistenza |
180KΩ |
SMD |
0805 |
|
|
R5 |
Resistenza |
3K9Ω |
SMD |
0603 |
|
|
R6 |
Resistenza 1% |
14KΩ |
SMD |
0805 |
|
|
R7 |
Potenziometro |
5KΩ B |
TH |
Dip 3pin |
|
|
R8 |
Resistenza 1% |
1K5Ω |
SMD |
0805 |
|
|
R9 |
Resistenza |
3K9Ω |
SMD |
0603 |
|
|
J 21, 22, 23 |
Piazzole per cavetto ingresso PWM |
|
|
|
|
|
J 11, 12, 13 |
Piazzole per cavetto Motore |
|
|
|
|
![]()
Scarica Datasheet
integrato MJM26111
Descrizione PIN CHIP NJM 2611
|
PIN |
Descrizione |
|
1 |
Su questo pin entra il segnale PWM (impulso variabile) generato dalla scheda Microcontrollore Renesas ciclicamente ogni 20 millesimi di secondo |
|
2 |
Su questo pin tramite la resistenza applicata R3 viene generata una tensione di riferimento e una corrente costante necessaria per generare la forma d'onda triangolare a "dente di sega" presente sul pin 14. II condensatore in parallelo C8 è un condensatore di filtro per ripulire la tensione di riferimento da rumore |
|
3 |
Su questi pin viene generata una tensione di 2.15 V applicata al potenziometro tramite R6 |
|
4 |
Il guadagno dell'impulso di "strecheter" è determinato dalla resistenza R4 applicata e dal condensatore C6 sul pin 5 |
|
5 |
Il guadagno dell'impulso di "strecheter" è determinato dal condensatore C6 e dalla resistenza R4 presente sul pin 4 |
|
6 |
La resistenza R9 applicata su questo pin definisce un valore di dead band ottimale |
|
7 |
Non utilizzato |
|
8 |
GND |
|
9 |
Pilotaggio transistor PNP esterno Q2 |
|
10 |
GND Potenza Motore |
|
11 |
Pin di connessione motore tra pin 11 e 13 e il collettore del transistor PNP esterno Q2 |
|
12 |
Pilotaggio transistor PNP esterno Q1 |
|
13 |
Pin di connessione motore tra pin 13 e 11 e il collettore del transistor PNP esterno Q1 |
|
14 |
Il condensatore C4 applicato su questo pin determina la forma d'onda a "dente di sega". La posizione del motore sarà decisa dal punto di picco del "dente di sega". La precisione del condensatore applicato e della resistenza R3 sul pin 2 sono determinati |
|
15 |
Il cursore del potenziometro è applicato su questo pin di ingresso del comparatore. C3 previene e filtra rumori. La posizione centrale del potenziometro è determinata dalla resistenza in serie R5 (con PWM di 1.5 ms) |
|
16 |
Alimentazione positiva |
|
C1 e C2, D1 e D2, R2 e R1 prevengono ed eliminano eventuali problemi di rumore generati dal motore e su commutazioni |
|
| Transistor HE8550 LOW VOLTAGE HIGH CURRENT SMALL SIGNAL PNP TRANSISTOR | ||
 1 -Base 2- Collector E- Emitter |
|
 |
| Piedinatura | Datasheet | Foto del transistor |
| Diodo LL4148 FAST SWITCHING DIODE | ||
 |
|
 |
| Piedinatura | Datasheet | Immagine |
| Elenco revisioni | |
| 06/06/2007 | Inserito datasheet componenti |
| 26/01/2007 | Emissione preliminare |



