![]()
![]()

ultimo aggiornamento 11 novembre 2017
|
ultimo aggiornamento 11 novembre 2017 |
|
|
|
Allegato al fascicolo n°
9 dell'opera pubblicata per la costruzione del
robot Robonox, è presente un
Servo tester, questo componente, visibile nella foto sotto riportata è in grado di generare un segnale PWM del tutto simile a
quello che ci fornirà la scheda Microcontrollore.
Il Servo Tester è indispensabile per la verifica di ogni servo che
andremo in seguito a realizzare.
Consente di verificare il corretto funzionamento del servo motore in
entrambe le direzioni, tramite la rotazione del potenziometro, e di
verificare il corretto posizionamento centrale dell'albero del servo
motore con la pressione del pulsante.
Il Servo Tester, genera l'impulso PWM tramite un piccolo microcontrollore a 8
bit, della famiglia Microchip, il
PIC 12C508 a soli 8 pin.
E' lui che assolve, tramite il potenziometro, il pulsante e pochi altri
componenti di contorno a generare l'impulso variabile per il test dei nostri
Servo Motori Analogici



Schema elettrico del Servo tester
I due connettori che
possono fornire alimentazione sono JP1 e JP4.
Il positivo della batteria da 9 Vcc entra sul convettore JP1 e arriva
sull'anodo del diodo D1 (tipo
1N4001), che protegge da eventuali inversioni di polarità errate, e il catodo del diodo é connesso al regolatore di
tensione
LM 7805
Vin.
L'uscita del regolatore
LM 7805
Vout é connessa anch'essa a JP4 (pin 1
positivo) che é il connettore per fornire alimentazione tramite il pacco
pile Ni-MH.
L'uscita del regolatore o il positivo di JP4 (pin 1) alimentano
direttamente il servomotore entrando sul connettore centrale di JP3 e
JP4 (pin 2).
Il microcontrollore viene alimentato da R3 e filtrato dai condensatori
C5 e C6.
Il pin 2 del
PIC12C508 (GP5) opera in due modi, inizialmente come uscita
e successivamente come ingresso.
Quando il pin é posto come uscita il
condensatore C4, attraverso la R2, viene caricato a potenziale positivo.
Successivamente il pin viene posto in ingresso e si misura il tempo di
scarica del condensatore.
Il tempo di scarica del condensatore é
determinato dalla posizione del potenziometro di VR1; in questo modo il
PIC12C508 internamente misura il tempo di scarica e genera il PWM sul
pin 7 (GP0), il quale tramite la R4 arriva su entrambi i pin 1 di JP2 e
JP3 per il controllo del servo motore.
Il pulsante S1, quando premuto, disattiva la misura della scarica di C4
e genera un PWM fisso a 1,5 mS.
I restanti condensatori come C1, C2 e C3 sono condensatori di filtro per
ripulire l'alimentazione
Schema SMC - La distinta componenti
|
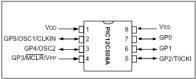
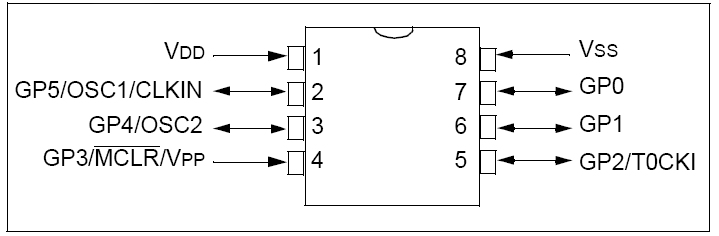
| Processore PIC12C508A | ||
 |
|
 |
| Piedinatura | Datasheet | Foto del processore |
| LM 7805 Regolatore di tensione | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| Diodo 1N4001-1N4007 | ||
 |
|
 |
| Piedinatura | Datasheet | Foto |
Alcune delle caratteristiche principali del PIC 12C508 fornite da Microchip sono:
|
|
GP e l'acronimo del termine inglese General
Purpose, in cui l'utilizzo del pin è flessibile e non specifico; può essere
usato come ingresso o come uscita o in relazione all'architettura interna nel
chip. Ad esempio, GP4 è sia un pin di General Purpose sia OSC2 (oscillatore
insieme a GP5/ OSC1), volendo usare un quarzo esterno.
Da come si può osservare, molti pin non sono usati.
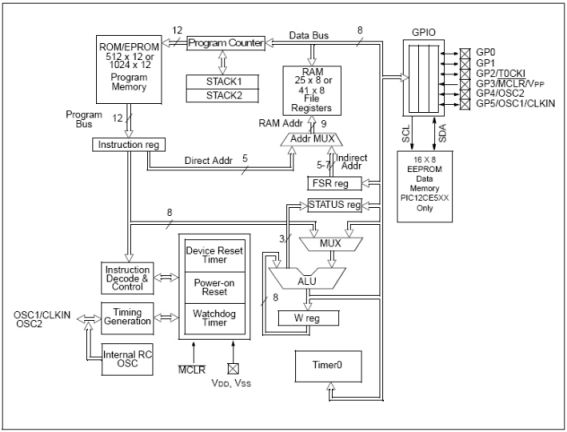
Schema a blocchi del processore

Ogni operazione è bene che sia effettuata in due fasi
distinte:
1. prima di inserire il motore e ingranaggi negli appositi contenitori
2. post inserimento negli appositi contenitori
Il Servo Tester è di dimensioni compatte, 52 x 61 mm, alto 27 mm circa e
richiede inizialmente una pila da 9 V per operare; in seguito si potrà usare
quella al Ni-MH ricaricabile.
Il servo tester dispone di:
2 connettori servo S1 e S2 con chiave di polarizzazione su cui applicare il servo
1 pulsante per modalità operativa (zero centrale e potenziometro)
1 presa per batteria da 6 Vcc a 7,2 Vcc al Ni-Mh (connettore bianco nel contenitore)
1 potenziometro per regolazione PWM (entro un dato campo)
1 presa per batteria a 9 Volt (connettore con clips Rosso/Nero)

Il funzionamento è molto
semplice, applicando una pila da 9 V, il servo tester è operativo.
Per comodità e disponibilità sono state previste due prese di
alimentazione, ma una sola dovrà essere utilizzata.
Applicando la batteria sul cavetto per batteria da 9 V o sul connettore
a 2 poli, il PWM è subito presente su entrambi i connettori S1 e S2 del
Servo tester i quali sono connessi in parallelo.
Il pulsante rosso, indicato come 2 nell'immagine sopra, ha due modi
operativi, quali:
pulsante premuto = posiziona l'albero a centro corsa
pulsante sollevato = il potenziometro posiziona l'albero del
motore in uno dei due sensi, destra o sinistra.
Se il servo motore non e assemblato il
comportamento è atipico, poiché l'albero del potenziometro non e
ancorato agli ingranaggi di moto riduzione.
Il motore in tal caso girerà sempre in uno dei due sensi fino a quando
il potenziometro non verrà portato in posizione manualmente, cosa che
verificheremo in seguito
| Elenco revisioni | |
| 11/11/2017 | Aggiornato pagina |
| 01/06/2007 | Emissione preliminare |

