![]()
![]()
![]()
ultimo aggiornamento il 25 maggio 2010
|
|
|
|
|
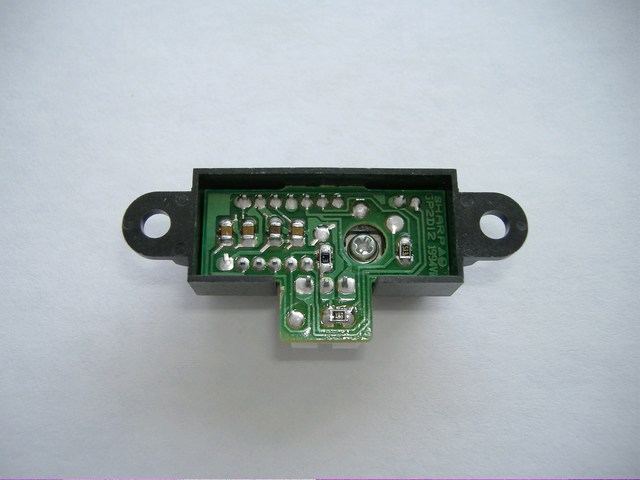
Il sensore di distanza con GP2D12 è di tipo ad infrarosso utilizzato in questa pagina è prodotto dalla ditta Sharp.
 |
Datasheet sensore
|

Il prodotto non è stato concepito
espressamente per la robotica, ma viene utilizzato principalmente nelle
fotocopiatrici per rilevare la presenza di carta.
La distanza di rilevazione è compresa tra i 10 e gli 80 cm.
Questi sensori hanno una buona immunità alla luce ambientale e possono per
questo essere utilizzati in condizioni di luce differenti ad eccezione di
ambienti esterni molto luminosi.
Il sensore potrà essere utilizzato al posto di un sensore di contatto.
il sensore utilizza un fascio ad infrarosso
modulato che facilita l’esclusione di falsi segnali, il sistema di
rilevazione è preciso anche se l’oggetto rilevato diffonde o assorbe la luce
ad infrarosso.
L’uscita del sensore è una tensione analogica proporzionale alla distanza
dell’oggetto, questa varia da un massimo di 2,5V per un oggetto a 10 cm ad
un minino di 0,4V per un oggetto posto a 80 cm.
Il sensore è dotato di un
connettore a 3 pin, uno per la tensione di alimentazione che deve essere di
+5V,il contatto di massa e il contatto di uscita.
Per il collegamento alla
scheda BS2 SX è necessario l'utilizzo di una
piccola scheda
con un integrato ADC0831 che rappresenta un convertitore analogico digitale
a 8 bit.
 |
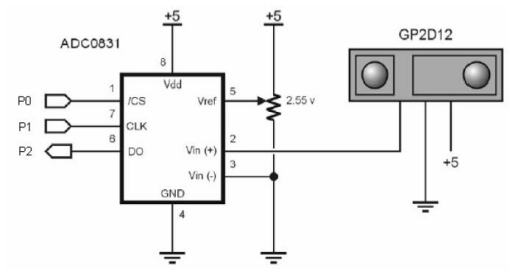 |
Collegamento e test
Collegare il GP2D12 al
convertitore analogico-digitale
utilizzando il connettore a tre pin presente sul modulo (+5V, GND, segnale).
Il potenziometro collegato al pin Vref sul ADC0831 viene
utilizzato come un divisore di tensione per regolare la tensione di
riferimento di 2,55 volt, per controllare utilizzare un multimetro e
misurare la tensione tra i pin 5 (Vref ) e il pin 4 (GND), e
regolare la vite del trimmer sino a leggere 2,55V.
Sull' ADC0831 questo darà un valore compreso tra 000000000- 11111111 in
binario oppure 0 a 255 in decimale per una tensione di ingresso
compresa tra 0 e 2,55 volt.
Questo permetterà una risoluzione di 0,01V = 10mV per passo dal ADC.

Taratura
Poiché l'uscita del GP2D12 non è lineare, abbiamo bisogno di un modo per
determinare quali distanze corrispondono le tensioni misurate.
Un modo per calibrare il sensore è misurare la tensione di uscita dal
sensore GP2D12 a distanze fisse, in centimetri, come mostrato nel grafico
seguente.
Una volta ottenute queste informazioni è possibile inserire questi numeri
nella memoria EEPROM nel programma.
La tabella di dati è utilizzata da una routine nel programma per calcolare
le distanze, che vengono poi visualizzato sul terminale Debug, insieme alla
tensione di uscita dal sensore.
 |
 |
|
Programma_1.BSX |
Programma_2.BSX |
| ADC0831 Convertitore analogico digitale | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
 |
 |
 |
 |


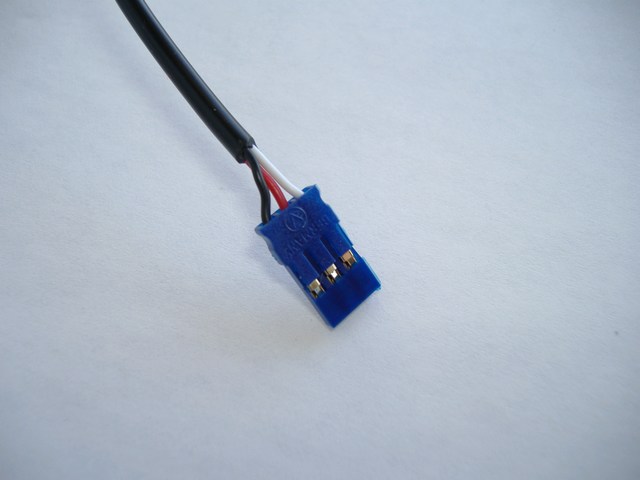
Per la
realizzazione del cavo ho utilizzato in cavo di alimentazione fornito
con il fascicolo n°14 dell'opera
I-Droid 01 e non
utilizzato.
Questo presenta da un lato un connettore femmina compatibile a quello
del sensore.
Dall'altro lato ho provveduto a inserire un connettore analogo a quello
utilizzato per i servomotori, questo possono essere reperiti in un
negozio di modellismo a 1,20 € la coppia.
 |
 |
| Elenco revisioni: | |
| 25/05/2010 | Inserito programmi, completato descrizione |
| 25/01/2010 | Aggiornato pagina |
| 12/12/2008 | Aggiornato pagina |
| 04/12/2008 | Emissione preliminare |