![]()
ultimo aggiornamento il 09/09/2008
|
ultimo aggiornamento il 09/09/2008 |
|
|
|
|
Quella visibile
nelle figura a fianco è un piccolo modulo (la basetta misura 44x22mm) |
|

Descrizione
Il modulo è formato principalmente da due microinterruttori a lamella
connessi alle due morsettiere SW-SX e SW-DX.
 |
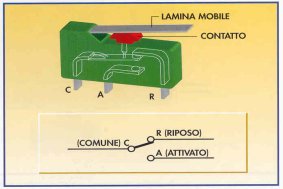 |
Questi sono poi connessi alle porte del processore. I pin I/O
collegati a ciascun interruttore rilevano la tensione alla resistenza da
10 kΩ (R1 e R3) di pull-up.
Quando uno dei baffi non è premuto, la tensione al pin I/O collegato a
quel baffo è 5 V (1 logico). Quando un baffo invece è premuto, la linea
I/O è messa a massa (Vss), in questo modo, la linea vede 0 V (0 logico).
|
|---|
|
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
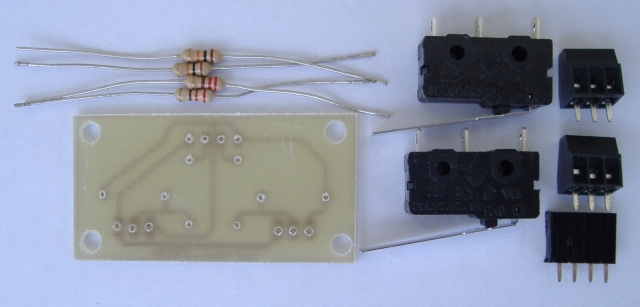
Circuito stampato e disposizione componenti
|
|---|
|
Montaggio e collaudo
A questo punto si
eseguiranno i collegamenti tra il connettore SV1 e X4 della scheda
madre seguendo le indicazioni dello schema elettrico.
|
|
|---|

Foto del prototipo fatto da Laerte Olmelli
| Elenco revisioni: | |
| 09/09/2008 | Emissione preliminare |