![]()
![]()
ultimo aggiornamento il 2 settembre 2010
|
|
|
|
|
| Il modulo descritto in questa
pagina si basa sull'integrato L293, con esso è
possibile pilotare una coppia di motori elettrici in corrente continua oppure un
motore passo-passo. Opportunamente pilotato permette anche il controllo della direzione dei singoli motori. L'integrato utilizzato è L293, di questo integrato esistono vari modelli che si differenziano per caratteristiche e numero di piedini questi sono riconoscibili dalle lettere che accompagnano la sigla numerica.
|
|

| Sigla | Numero pin | Corrente di uscita |
Corrente di picco (non ripetitiva) |
Note | Datasheet |
| L293 | 16 | 1 | 2 |
|
|
| L293 B | 16 | 1 | 2 |
|
|
| L293 D | 16 | 0,6 | 1,2 | Con diodi in uscita |
|
| L293 E | 20 | 1 | 2 | Con pin Sense |
|
Questo integrato è un driver a 4 canali di tipo push-pull con 4 diodi di
protezione interni per il ricircolo della corrente.
Può fornire in uscita una corrente massima per ogni canale di 600 mA con una
corrente di picco ( non ripetitiva) di 1,2 A, con una massima tensione di alimentazione di 36V.
Per l'alimentazione della parte logica è sufficiente una tensione minima
di 4.5V.
Per il suo funzionamento è necessario collegarlo ad un processore
utilizzando 4 porte, 2 per motore.
|
|
E' un circuito integrato a 16 terminali (in contenitore DIP16) che contiene 4 amplificatori di potenza per il comando di motori in corrente continua o passo-passo (stepper motor);
Gli amplificatori di potenza possono essere usati indipendentemente l'uno dall'altro oppure in coppia per realizzare pilotaggi con configurazione a ponte;
Il controllo del funzionamento degli amplificatori viene fatto mediante livelli di tensione compatibili TTL (H:+5V, L:0V), dunque perfettamente interfacciabili con il PIC;
Per ogni coppia di amplificatori è presente un ingresso di abilitazione (ENABLE) che, se posto a livello logico ALTO ne abilita il funzionamento, se posto a livello BASSO pone gli stessi in stato di alta impedenza
L'integrato è provvisto internamente sia di una protezione termica che di una protezione contro i cortocircuiti delle uscite verso massa;
I quattro terminali centrali di massa possono essere saldati ad una apposita piazzola dimensionata per ottenere una valida dissipazione del calore.
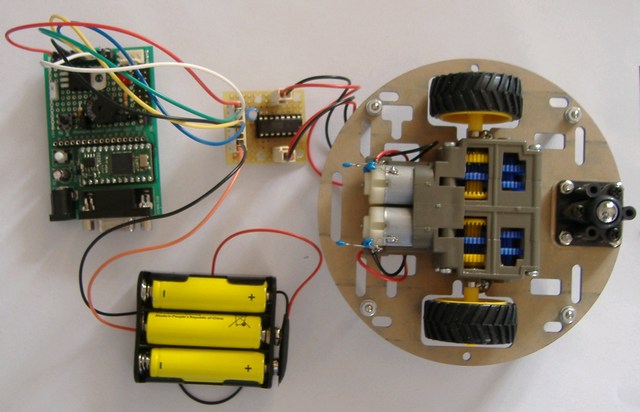
Pilotaggio di motori con un solo senso di rotazione
Lo schema mostra i possibili collegamenti di motori che
ruotano in un solo senso e che
possono essere azionati e/o fermati in diverse modalità a seconda dei livelli
logici posti sui
vari ingressi di comando (vedi tabella riportata a fianco);
● I diodi di ricircolo inseriti in parallelo al motore hanno lo scopo di
proteggere l'integrato di
potenza dalle sovracorrenti che si generano quando il motore viene fermato;
● La tensione VCC2 (piedino 8) deve essere scelta in base alle caratteristiche
dei motori
impiegati, mentre VCC1 (piedino 16) è la tensione di alimentazione della logica
di controllo,
generalmente +5V (TTL); in questo modo anche i vari segnali di comando possono
essere
dati mediante livelli logici TTL.
|
|
L=Livello basso, H=Livello alto , X= non collegato |
Pilotaggio di un motore con inversione del senso di rotazione
Lo schema mostra il collegamento di un motore che può essere
fatto ruotare in entrambi i sensi oppure fermato; per fare ciò viene utilizzata
una configurazione a ponte degli amplificatori interessati che, sotto l'azione
dei segnali di comando impostati secondo quanto mostrato nella tabella a fianco,
provvedono a invertire opportunamente la polarità ai capi del motore oppure a
fermarlo.
● Anche in questo schema sono previsti i diodi di ricircolo a protezione
dell'integrato;
● Le tensioni VCC1 e VCC2 vanno scelte in base a quanto sottolineato
nell'esempio
precedente.
 |
L=Livello basso, H=Livello alto , X= non collegato |
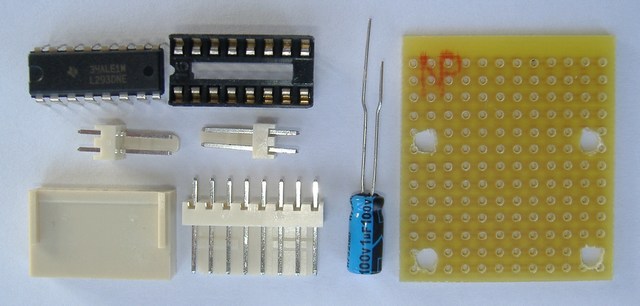
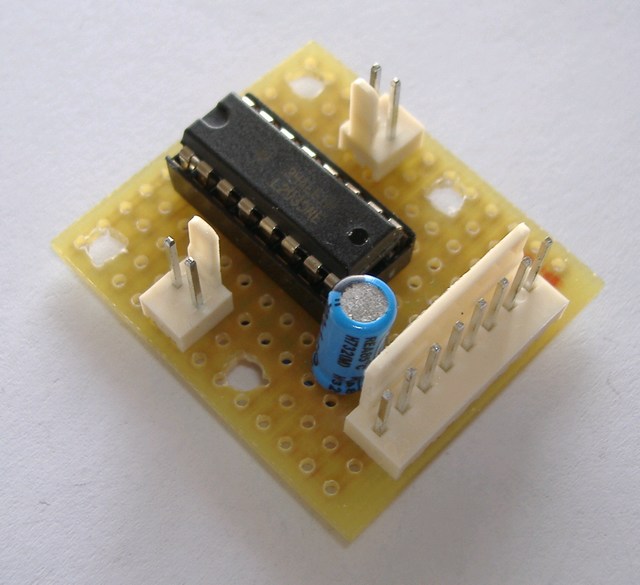
Costruzione della scheda di controllo
La costruzione della scheda è molto semplice in quanto è composta solamente dall'integrato L293D, che ha già all'interno i diodi, un condensatore per il livellamento della tensione di alimentazione e le morsettiere per il collegamento con il processore di controllo e i motori, la basetta misura 34x34mm circa.
 |
|
||||||||||||
| L293D Driver per ponte H | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
Circuito stampato e disposizione componenti
 |
 |
Prototipo su basetta millefori
|
|
|
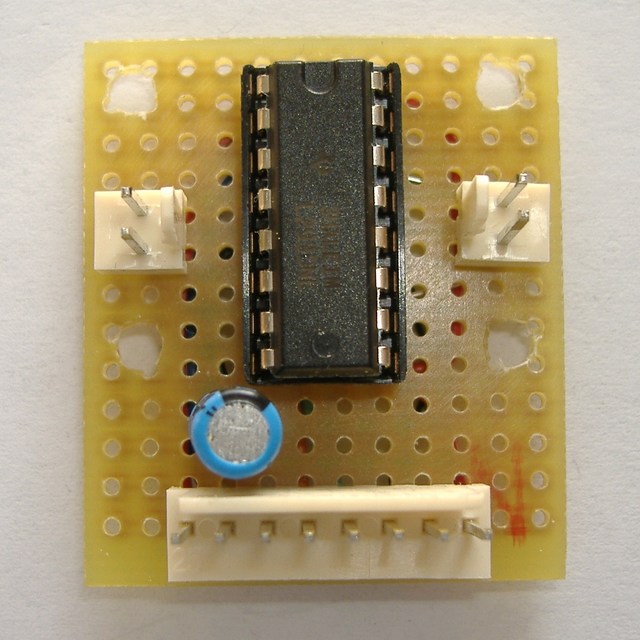
Versione definitiva con stampato in vetronite.
 |
 |
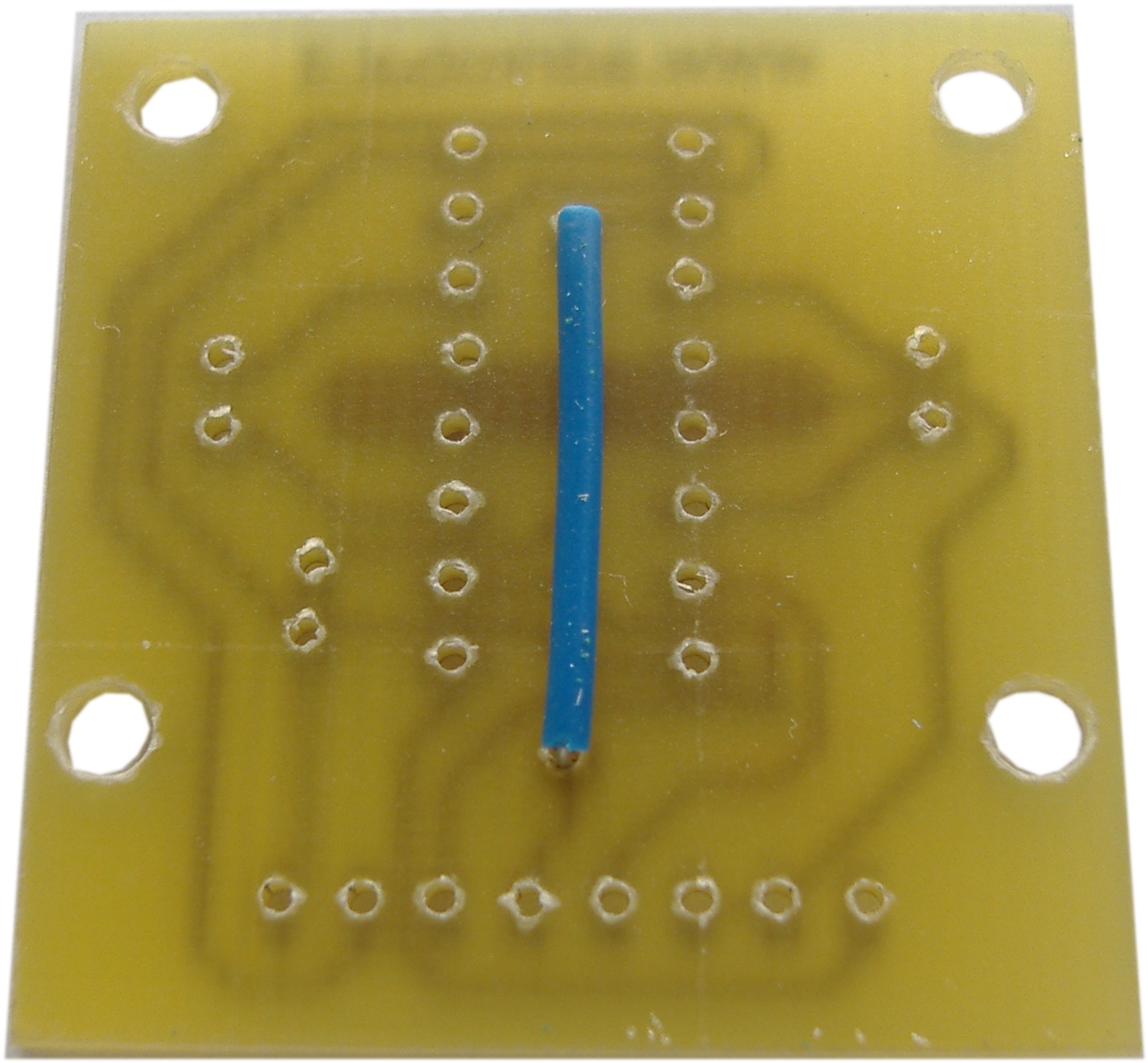 Dettaglio ponticello posto sotto lo zoccolo dell'integrato |
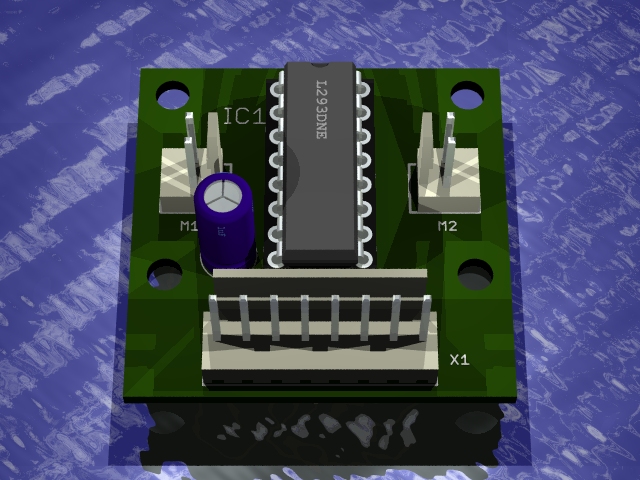 Immagine 3D della scheda |
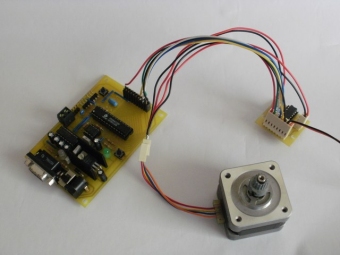
Pilotaggio motore passo-passo bipolare
|
|
|
|
|
|
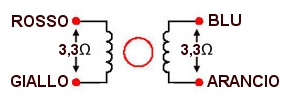
Determinazione delle coppie di bobine in un motore bipolare
| Rosso | Giallo | Blu | Arancio | |
| Rosso | - | 3,3 Ω | ∞ | ∞ |
| Giallo | 3,3 Ω | - | ∞ | ∞ |
| Blu | ∞ | ∞ | - | 3,3 Ω |
| Arancio | ∞ | ∞ | 3,3 Ω | - |
![]()
Programma Test_modulo_L293-stepper.BSX
| Elenco revisioni: | |
| 02/09/2010 | Aggiornato pagina, inserito filmato pilotaggio motore passo-passo. |
| 25/01/2010 | Aggiornato pagina, inserito foto della scheda definitiva |
| 02/03/2009 | Emissione preliminare |