ultimo aggiornamento il 2 dicembre 2013
|
ultimo aggiornamento il 2 dicembre 2013 |
|
|
|
|
Utilizzo
Il modulo line follower permette, se montato su un robot semovente, di
seguire un percorso realizzato per esempio con del nastro nero su di un
foglio bianco.
Piedinatura del sensore QRD1114. |
|
|---|

Descrizione
Questi, a differenza del modulo sensori d’infrarossi, non sono
utilizzati per rilevare ostacoli, ma per distinguere i contrasti di
colore.
Per farlo, si sfrutta la proprietà dei materiali di riflettere o di
assorbire i raggi IR emessi per rilevare il percorso da seguire. Queste
variano a seconda del colore: le superfici nere tendono ad assorbire la
quasi totalità delle radiazioni, mentre le superfici bianche tendono a
riflettere i raggi IR.
Sfruttando questo comportamento possiamo
distinguere la presenza o meno di una linea nera su una superficie
bianca, o viceversa, e di seguirla.
Nel schema, 3 porte del processore sono connesse all'emettitore
IR di ogni sensore QRD114 : assegnando la porta a un valore basso, l'emettitore
corrispondente risulterà acceso; viceversa con un valore logico alto il
led IR rimarrà spento.
Quando è acceso, la radiazione riflessa dalla superficie sottostante è
"intercettata" dal ricevitore (il fototransistor) generando una corrente
proporzionale alla quantità di radiazione catturata. Il fototransistor è
posto in serie alla resistenza R3 da 10 kohm: dunque, il valore che sarà
utilizzato sarà quello della tensione presente alla base del resistore.
Questa tensione è trasmessa al circuito comparatore formato
dall'integrato IC1 , un LM311N, dal trimmer R6 e dalle
resistenze R4 e R5.
L'uscita di questo comparatore è connesso alla
restante porta del processore.
Questa può assumere valore logico basso
(0) o alto (1), in base ai due ingressi dell'integrato IC1 ( pin 2 + e
pin 3 -).
Se l'ingresso pin 3 ha un valore di tensione maggiore di
quella del pin 2, l'uscita del circuito avrà un valore basso (0) e
viceversa.
L'utilizzo del trimmer R6 permette di calibrare in modo
ottimale il circuito.
Visto che tutti i sensori sono connessi in
parallelo allo stesso comparatore, è necessario che essi siano attivati
uno per volta.
|
 |
|
||||||||||||||||||||
 |
|||||||||||||||||||||
|
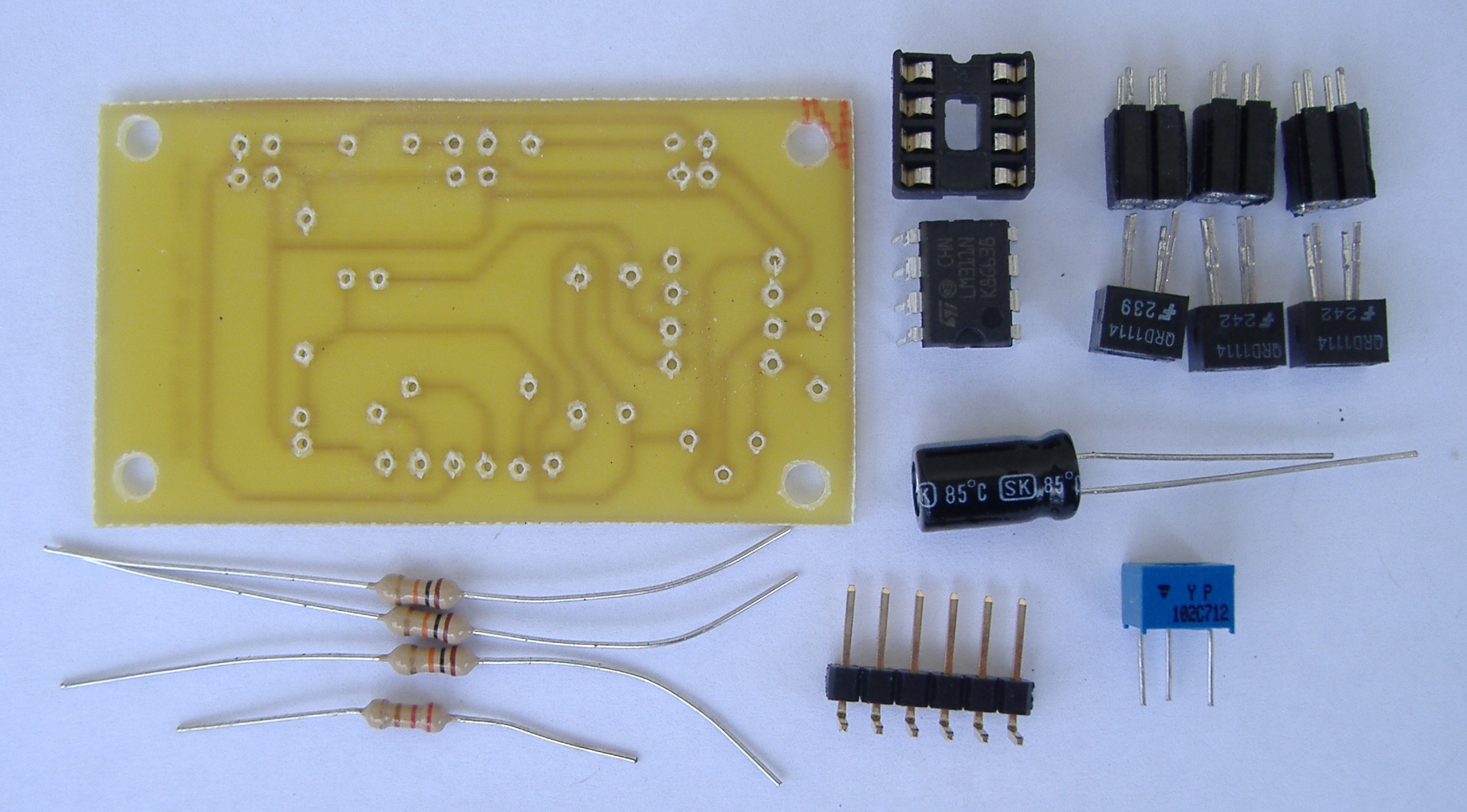
Circuito stampato e disposizione componenti
|
| LM 311 Comparatore singolo | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| Sensore ottico a raggi infrarossi a riflessione tipo QRD1114 | ||
 1-Collettore 2-Emettitore 3-Anodo 4-Catodo |
|
 |
| Piedinatura | Datasheet | Foto del sensore |
Montaggio e collaudo
Dopo aver realizzato il circuito stampato e aver saldato i vari componenti, compresi i due ponticelli a lato del sensore line, si potranno collocare i 3 sensori, posizionando il led emettitore nella parte anteriore, far riferimento alla foto sotto.

L’integrato IC1 andrà collocato
nell’apposito zoccolo, con la tacca di riferimento rivolta verso il
trimmer R6.
Caricato il programma di test, regolare il trimmer R6 in modo che
sia mostrato un 1 (vedere figura sotto) solo in corrispondenza della
posizione in cui è presente la linea nera e 0 nelle altre posizioni
 |
Programma TEST_MODULO_line-follower.BSX |
|
| Elenco revisioni: | |
| 02/12/2013 | Aggiornato pagina |
| 04/12/2008 | Emissione preliminare |