ultimo aggiornamento il 15/09/2008
|
ultimo aggiornamento il 15/09/2008 |
|
|
|
|
Quella visibile
nelle figura a fianco è un piccolo modulo (la basetta misura 44x22mm) |
|
||||||||||||||||||
|
|||||||||||||||||||
|
Descrizione dei pin
|
|---|

|
|
Questo modulo è descritto sul numero 277-278 in edicola nel mese di Luglio 2008 della rivista Fare Elettronica nella sezione ROBOT ZONE nell'articolo dal titolo Moduli input/output per la scheda robotica che descrive la costruzione di ben 11 moduli da collegare alla scheda basata sul processore BS2 SX di PARALLAX.
|
|
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
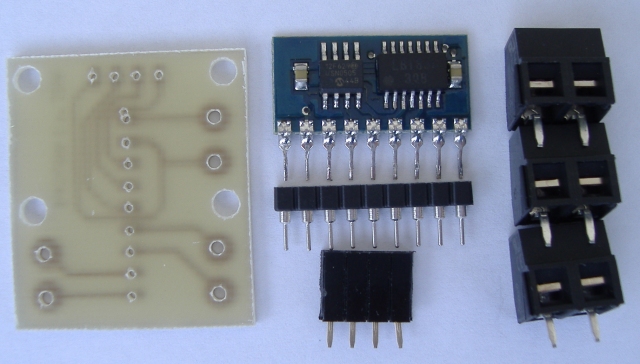
Circuito stampato e disposizione componenti
|
|---|
|
Montaggio e
collaudo
Dopo aver fornito alimentazione alla morsettiera M3 si potrà
utilizzare il programma di test che mostrerà i comandi in esecuzione
sullo schermo (vedere figura 29).
|

|
|---|
| Elenco revisioni: | |
| 15/09/2008 | Emissione preliminare |