![]()


ultimo aggiornamento 2 ottobre 2007
![]()
![]()
![]()
![]()
![]()
![]()
|
|
ultimo aggiornamento 2 ottobre 2007 |
|
|
|
|
Navigando su internet mi sono imbattuto su
un sito giapponese
http://micono.cocolog-nifty.com/blog/rbt001/index.html in cui viene
trattata la possibilità di utilizzare il modulo Bluetooth RBT-001 utilizzato nel
robot
I-D 01 sempre della DeAgostini.
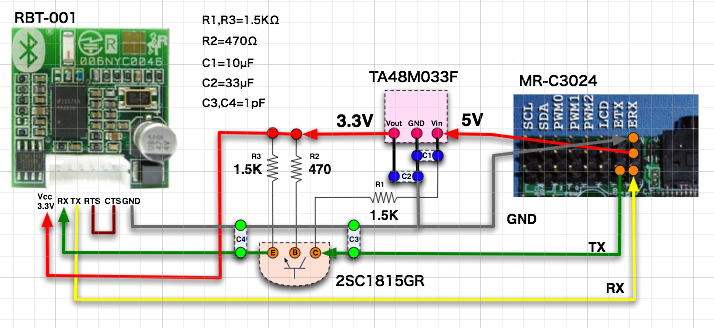
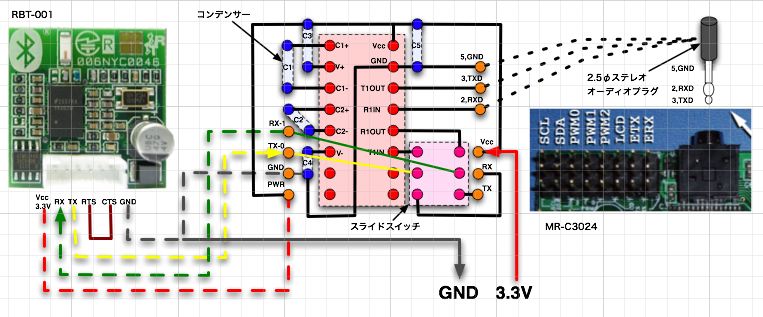
Prima versione di circuito che utilizza i connettori ETX e ERX Il collegamento prevede di prelevare il segnale RX e TX dagli appositi connettori presenti nella sezione funzioni avanzate, questi che sono a logica TTL 5V devono essere convertiti a 3.3V. Anche l'alimentazione è prelevata dal connettore e ridotta tramite l'integrato TA48M033F.
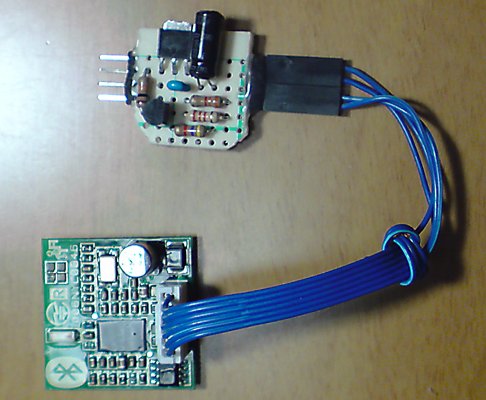
Seconda versione di circuito che utilizza il connettori jack seriale
Il collegamento in questo caso prevede di
prelevare il segnale RX e TX dal connettore di collegamento tramite
apposito cavo alla porta seriale del PC.
Caratteristiche del modulo.
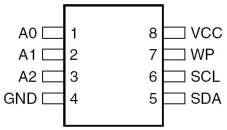
La funzione dei pin di connessione:
Condizioni di lavoro:
|
||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
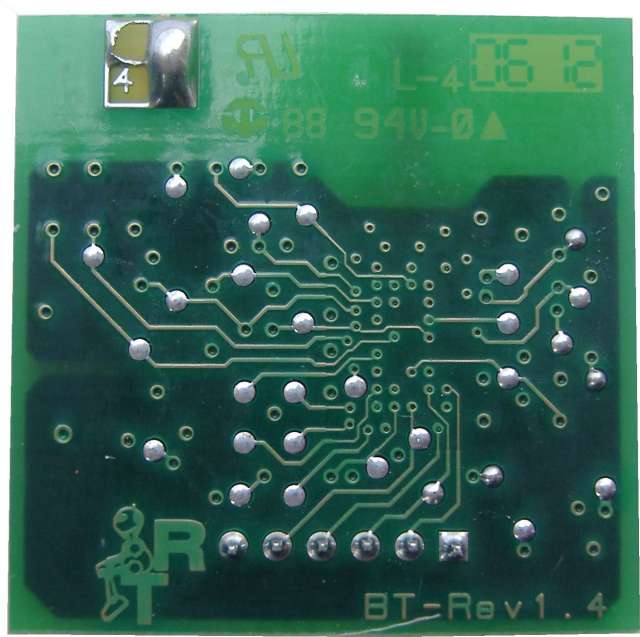
Foto del modulo del robot i-Droid 01
|
|---|
| 1 | 2 | 3 | 4 | 5 |
| Processore LMX9830 Bluetooth™ Serial Port Module | Memoria tipo 24C64B 2-Wire Serial EEPROM 64K (8192 x 8) | Quarzo | Bobina | Led SMT |
 |
 |
|||
|
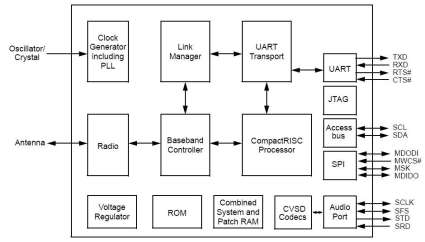
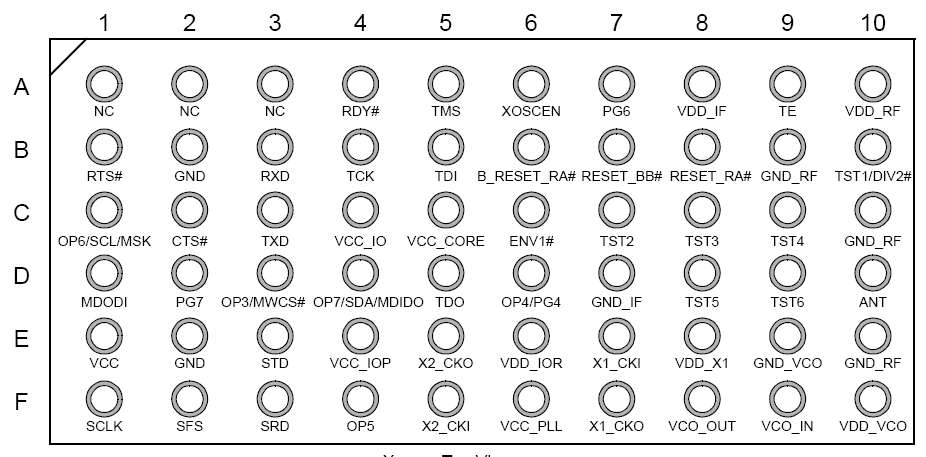
LMX9830 |
24C64B |
|||
 |
 |
FEATURES
DIGITAL HARDWARE
FIRMWARE
DIGITAL SMART RADIO
PHYSICAL
|
| Elenco revisioni | |
| 02/10/2008 | Inserito segnalazione di argomento caldo del forum. |
| 23/09/2008 | Emissione preliminare |