![]()


ultimo aggiornamento 23 novembre 2013
![]()
![]()
![]()
![]()
![]()
![]()
|
|
ultimo aggiornamento 23 novembre 2013 |
|
|
|
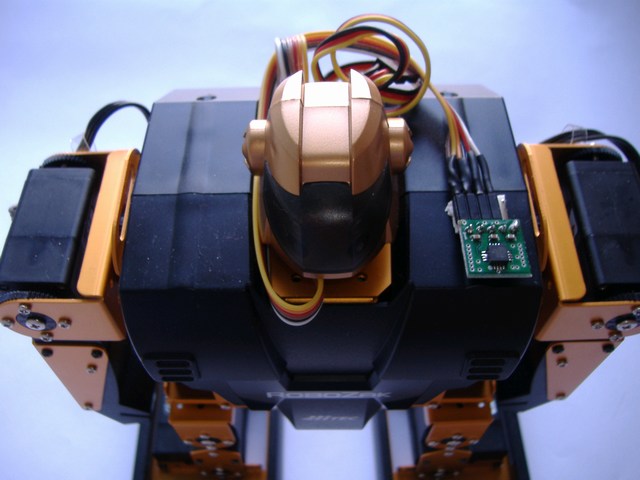
Il sensore qui a lato e stato previsto a suo tempo per essere installato nel
"fratello" italiano di
Robozak
ossia
Robonox.
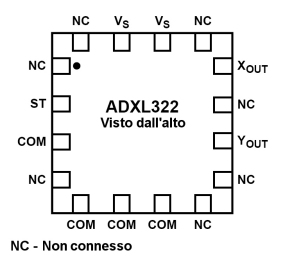
Il modello di sensore utilizzato per la scheda è ADXL 322
prodotto dalla
ANALOG
Devices.
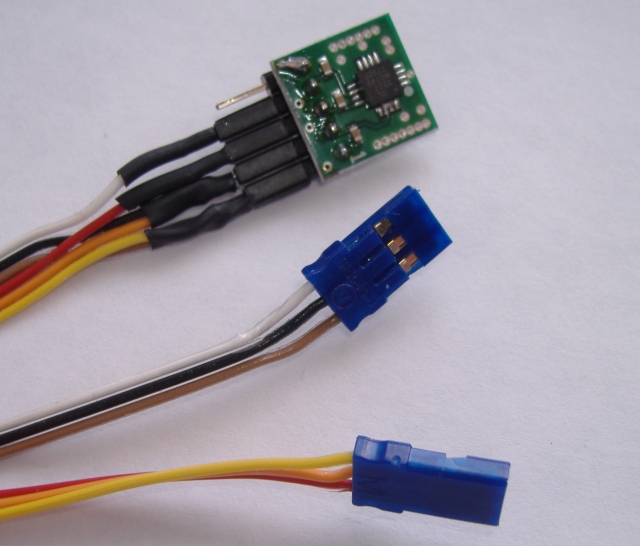
Il sensore è montato su un piccolo circuito stampato di 14 mm di lato e
dispone di un connettore a 5 pin.
Per il collegamento alla scheda deve essere realizzato un apposito cavo
d'interfaccia che prevede da un lato un connettore femmina a 4 pin e dall'altro
due connettore (tipo servo) femmina a tre pin.
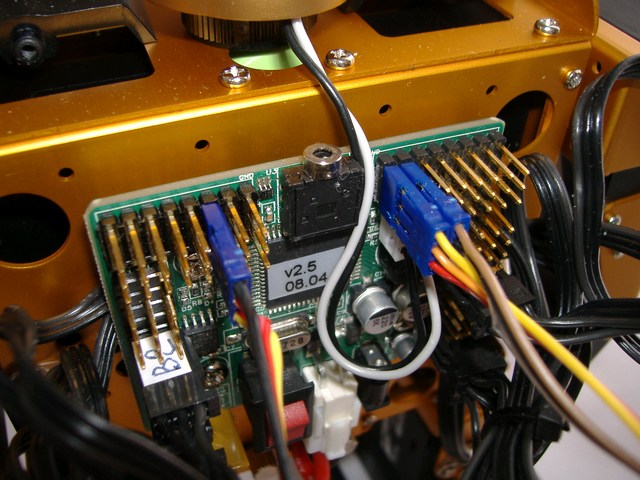
I due connettori andranno collegati a due porte del blocco A/D per esempio
AD0 e AD1.
|
||||||||||||||||||||||||||


|
ADXL322 Analog Devices
Alcune delle caratteristiche
sono :
|

Nella figura sopra si può vedere la tensione di
uscita per i due assi nelle varie posizioni del sensore, in nero sono riportate
le tensioni se il sensore è alimentato con una tensione di 3V, in rosso quelle
se alimentiamo il sensore con 5V, come nel caso di collegamento alle porte AD di
ROBOZAK.
Infine in verde è riportato il valore dato dalla conversione del valore
analogico in digitale.
In pratica quando il sensore è in piano la tensione di uscita vale la metà della
tensione di alimentazione, mentre varia da un minimo di 1,8 ad un massimo di 3,2
(con alimentazione di 5V) al cambiare della posizione del sensore.
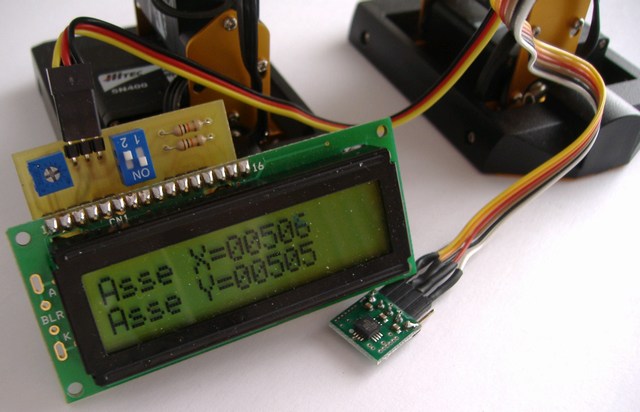
Praticamente, conviene fissare il sensore nella posizione voluta sul corpo del
robot, poi tramite il display LCD leggere il valore nelle posizioni che vogliamo
"Sorvegliare" e in base a questo scrivere il programma.
Schema elettrico
 Materiale per realizzare il cavo:
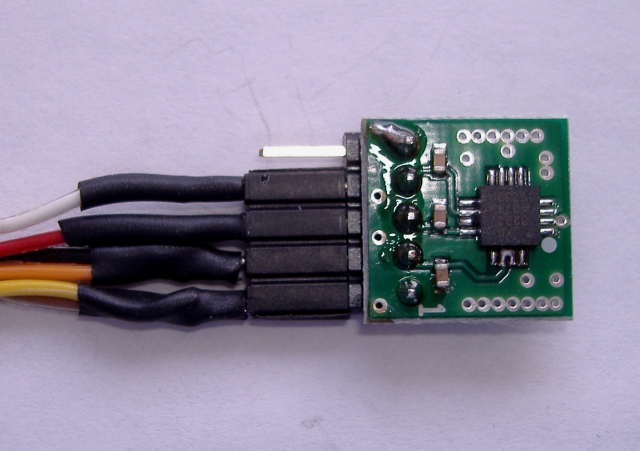
Foto del sensore di accelerazione
Lato frontale
Lato posteriore
|
| Elenco revisioni | |
| 17/03/2009 | Aggiornato pagina |
| 12/01/2009 | Emissione preliminare |