Scheda
comando
motore passo-passo
ultimo aggiornamento 4 febbraio 2008
![]()
![]()
![]()
![]()
![]()
![]()
|
Scheda
comando ultimo aggiornamento 4 febbraio 2008 |
|
|
|
| Il testo che segue è quello originale, leggermente adattato, il testo originale è disponibile scaricando il file in PDF. |


In questo articolo verranno fornite tutte le informazioni necessarie per costruire una interfaccia tra il calcolatore e un motore passo-passo
Durante la descrizione della parte realizzativa e di utilizzo di questa interfaccia verranno affrontati anche gli aspetti teorici relativi a questo tipo di motori, fino ad arrivare alla formulazione di un programma in BASIC necessario per il suo funzionamento.
Questo circuito può essere utilizzato anche come controller, poiché se viene abbinato ad un qualsiasi
relè di tipo standard facilita la comunicazione dei PC con il mondo esterno.
Il primo tema che bisogna affrontare riguarda il funzionamento dei motori passo-passo; conoscendo questo aspetto sarò possibile comprendere i metodi e le tecniche utilizzate per il loro controllo con l'interfaccia proposta.
| I MOTORI PASSO-PASSO Solo pochi componenti hanno provocato tante mutazioni nel mondo dell'automazione industriale come i motori passo-passo. Oltre alla vastissima gamma di applicazioni nell'industria meccanica moderna, questi motori costituiscono l'elemento fondamentale della robotica applicata. Quando si parla di robotica industriale, si è portati a pensare ad apparecchiature molto grandi e complesse, ma non sempre è così. Di fatto, i motori passo-passo vengono utilizzati anche in dispositivi molto comuni, come possono essere i floppy drive dei calcolatore, le stampanti e addirittura qualche gioco per bambini. La conoscenza di questi dispositivi e dei loro circuiti di controllo è sicuramente un requisito indispensabile per coloro che intendono addentrarsi nel mondo dei l'elettronica industriale. Qualcuno si potrebbe chiedere cosa hanno di tanto particolare i motori passo-passo per essere considerati così speciali: bisogna sapere, che essenzialmente non differiscono molto da un motore in corrente continua standard, anche se il modo di operare è completamente diverso. Un motore passo-passo viene progettato e costruito non per ruotare in modo continuo ad una determinata velocità, ma per eseguire una rotazione angolare prefissata in corrispondenza di ogni impulso che arriva al suo sistema di controllo; ciascuna di queste rotazioni parziali viene definita passo reale dei motore. Ogni motore di questo tipo, per eseguire una rotazione completa di 360 gradi, deve effettuare un certo numero di passi finito, che dipende dalle caratteristiche intrinseche di costruzione. Un passo di 1,8 gradi può essere considerato un valore normale; ciò significa che ad ogni impulso (che sarà esaminato successivamente) ricevuto direttamente dal controller l'asse dei motore effettua una rotazione di 1,8 gradi per poi fermarsi. In questo caso, se l'asse deve effettuare una rotazione complessiva di 18 gradi è necessario applicare al controller dei motore 10 impulsi. Se invece si desidera una rotazione continua, che comunque avviene per scatti successivi, il controller deve ricevere un flusso permanente e costante di impulsi. Un esempio significativo dei sistema di controllo di un motore passo-passo è costituito dalla testina di una stampante, che percorre la carta longitudinalmente guidata da una cinghia dentata a sua volta pilotata da una puleggia dentata calettata sull'asse di un motore passo-passo. Il software (o per essere precisi il "firmware", un insieme di programmi contenuti in una memoria PROM) della stampante conosce in anticipo il numero di passi da applicare al suo motore, che corrispondono a un determinato numero di spazi percorsi dalla testina sulla carta. Dopo aver ordinato la stampa di un determinato carattere, il firmware invia al motore il numero esatto di impulsi perché questo si sposti dello spazio necessario per eseguire la stampa dei carattere successivo. Grazie al particolare sistema con cui vengono controllati questi motori, è possibile effettuare un cambio di direzione sfruttando semplicemente una logica molto simile a quella appena descritta. Questo è il motivo per cui alcune stampanti possono agire in entrambe le direzioni. Un'altra particolarità dei motori passo-passo è costituita dalla loro capacità di fermarsi in una posizione prestabilita, situazione che consente di posizionarli con precisione assoluta. Si può utilizzare uno di questi motori per controllare ad esempio la rotazione di una vite filettata applicata ad una piattaforma scorrevole dotata di un foro filettato. Questa vite senza fine consente lo spostamento avanti/indietro della piattaforma di uno spazio proporzionale al numero di impulsi o passi forniti al motore. Con due viti di questi tipo, tra loro orientate di 90 gradi, si può generare un movimento sul piano X-Y simile al movimento dei pennino di un plotter. Con una apparecchiatura dotata di tre dispositivi passo-passo si può ottenere un movimento spaziale sui tre assi, condizione molto frequente nella meccanica dei processi industriali. |
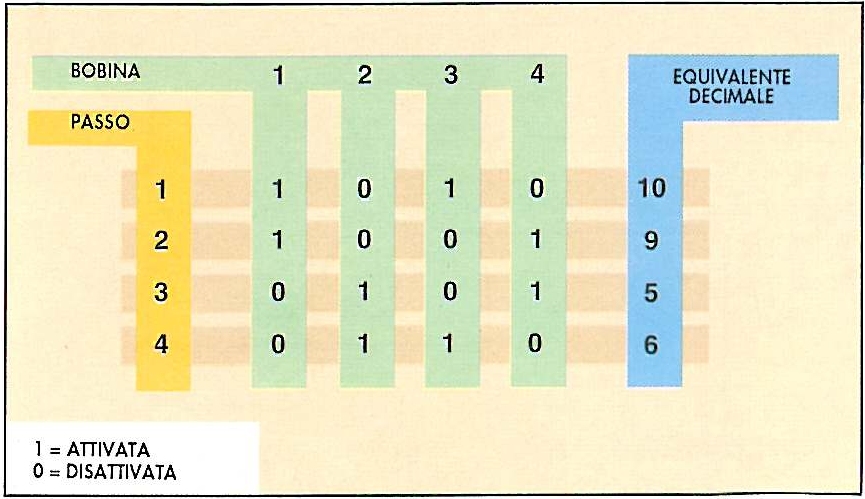
| AVANZAMENTO PASSO-PASSO La struttura di un motore passo-passo è simile a quella dei motori in corrente continua a magnete permanente. Entrambi infatti utilizzano un rotore a magnete permanente uno statore formato da armatura e da una bobina (o da una serie di bobine) che costituisce l'avvolgimento necessario per generare il campo magnetico. Questo campo si oppone a quello creato dal magnete permanente, e genera la rotazione dei rotore. In un motore standard è necessario provocare una "commutazione" che faccia variare il campo generato dalle bobine, in modo che l'opposizione di quest'ultimo sia continua rispetto al campo intrinseco dei rotore per dare origine al movimento ininterrotto. Nei motori "normali" questa commutazione viene realizzata per mezzo di "spazzole" e di un collettore a lamelle (formato da un cilindro segmentato in piccole parti o lamine che viene calettato direttamente sull'asse di rotazione). La rotazione dei motore provoca di conseguenza anche la rotazione dei collettore, che chiude il circuito delle diverse bobine di statore in funzione delle lamelle che di volta in volta vengono a contatto con le spazzole; ovviamente queste bobine sono costruite in modo da essere attraversate dalla corrente alternativamente in senso opposto, per creare quella continuità di flusso magnetico che si oppone allo statore per provocarne la rotazione. A differenza di quanto detto sinora, nel motore passo-passo la commutazione avviene in un circuito esterno a quello dei motore stesso, che provoca il collegamento o l'apertura delle bobine tramite dei transistor. Inoltre, in questi motori non è richiesta la generazione di un campo magnetico continuo in opposizione; ciò che si vuole ottenere è semplicemente una "attrazione" dei rotore da parte delle bobine per portarlo in una posizione prestabilita e mantenerlo in quella condizione. Per far avanzare il motore di un passo, è necessario eccitare determinate bobine per provocare ancora l'attrazione del rotore nella nuova posizione.
Nella tabella riportata in figura 2 viene presentata una sequenza tipica di attivazione. |
| IL MOTORE Attualmente non è difficile trovare in commercio un motore passo-passo per la costruzione di un prototipo sperimentale. Ad esempio, è possibile recuperarlo da una stampante rotta o da un disk drive guasto, purché il problema non sia dovuto proprio al motore stesso.
|
| L'INTERFACCIA Invece di utilizzare un circuito di controllo complesso, oppure addirittura una scheda a microprocessore, si è preferito progettare un controller costituito semplicemente da una interfaccia non intelligente in grado però di permettere il colloquio tra un personal computer ed il motore. Ciò significa che il compito di "pensare" spetta al calcolatore, mentre la scheda di controllo si limita ad applicare i segnali ricevuti dal PC alle bobine dei motore. Esistono diversi sistemi per immettere e ricevere informazioni da un elaboratore, ma in questo caso si è preferito scegliere la via più semplice utilizzando la porta Centronics dedicata alla stampante. Questa infatti è una porta parallela, per cui si hanno a disposizione simultaneamente otto linee con i relativi bit. Tutto quello che si deve fare è utilizzare quattro di queste linee, assegnare ciascuna di esse ad una delle bobine dei motore passo-posso, e comunicare al calcolatore di inviare l'opportuna sequenza per il controllo dei motore. Il controller svolge due funzioni piuttosto semplici:
|
| Elenco revisioni: | |
| 04/02/2008 | Emissione preliminare |