![]()
![]()
ultimo aggiornamento 27 gennaio 2012
|
ultimo aggiornamento 27 gennaio 2012 |
|
|
|
|
|
Rivista
n° 297 in edicola nel
mese di Marzo 2010 nella sezione Progettare e costruire, titolo
dell'articolo
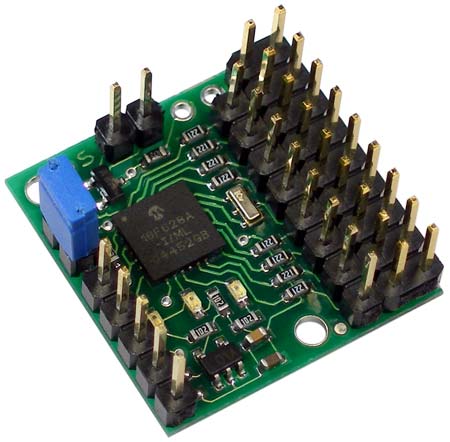
Controller
per servo e sensore PIR
, inerente il
Serial Servo Controller della Pololu
e un sensore di
tipo PIR. Vengono illustrati il loro funzionamento in rapporto alla scheda con processore Basic Stamp 2 SX e Cubloc CB220.
|
Per collegare il Servo Controller alla scheda basata sul CB220
 |
 |
Scheda con CUBLOC CB220 usata per la prova

Si utilizzerà il connettore CON5 che è connessa alla porta P11 del processore (già configurata come porta seriale a livello TTL) su questo connettore sono poi presenti la alimentazione, la massa.
Connettore CON5 – porta seriale
Al servo Controller è collegato un solo servo, ma ne possono essere collegati
sino a 8.
Essi sono poi, da alimentare tramite l’apposito connettore con una
tensione compresa tra 4 e 6 V, verificare questa in base alle caratteristiche
dei servo utilizzati.
Collegamento Servo Controller
Per comandare il Servo Controller con il CB220 occorre prima di tutto aprire la
comunicazione seriale della porta 1 con il comando
Opencom con la seguente
sintassi
Opencom 1,9600,3,5,50
Dove:
1 è la porta di comunicazione
9600 il baud rate
3 rappresenta i parametri di trasmissione 8 bits, Parity NONE e 1 bit di stop
5 la dimensione dl buffer di ricezione
50 la dimensione del buffer di invio
Quindi si utilizza l’istruzione
Putstr che invia una stringa sulla porta seriale
aperta
Putstr 1,&H80,1,1,7,127 ‘ Imposta la velocità del servo 7 pari a 127
Putstr 1,&H80,1,2,7,255 ‘ Imposta la posizione del servo 7 pari a 255
| Elenco revisioni | |
| 27/01/2012 | Inserito riferimento articolo rivista Fare Elettronica n° 297 |
| 14/01/2008 | Emissione preliminare |




