Per
caricare da PC il firmware nel microcontroller attraverso la porta
seriale RS232, è necessario utilizzare un software detto Programma di
Caricamento.
Il Programma di Caricamento apre la porta seriale del
PC ed aspetta di ricevere alcuni caratteri inviati dal Bootloader che, in
questo modo avverte di essere pronto alla ricezione del firmware ed alla
sua scrittura nella memoria non volatile del microcontrollore.
Ecco come utilizzarlo per scrivere nel PIC
16F876A un semplice programma di test che ci permetterà di verificare il
corretto funzionamento sia della comunicazione seriale che della
CPU.
1. PIC Downloader e caricamento del programma di test
- Assicurarsi di aver caricato sul microcontrollore PIC16F876A il
Bootloader, come come indicato nelle sezioni precedenti
- Controllare che le due piastre siano fissate rigidamente al supporto
provvisorio e che i cavetti di collegamento siano correttamente
inseriti.
- Inserire il microcontrollore PIC 16F876A nel suo zoccolo. Verificare
che l'orientamento sia corretto ( la tacchetta su uno di lati corti del
microcontrollore deve corrispondere con la tacchetta presente sullo
zoccolo ).
- Collegare il cavo seriale RS232 preparato precedentemente al PC ed
alla presa RJ del circuito.
- Se si sta utilizzando un adattatore
RS232-USB, l'adattatore di accenderà automaticamente e verrà
riconosciuto dal PC. Se è la prima volta che lo utilizzate, ci sono
ottime probabilità che il PC lo riconosca e lo installi automaticamente.
In caso contrario seguire le indicazioni di installazione fornite dal
produttore.
- Assicurarsi che l'alimentatore sia
spento e collegare la presa MiniDIN di alimentazione, SENZA ACCENDERE
il robot.

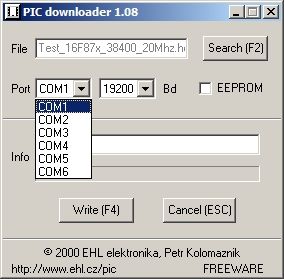
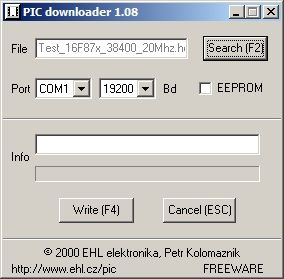
Utilizzando il tasto Search (F2) ,
selezionare il file Test_Alive_16F87x_38400_20Mhz.hex :
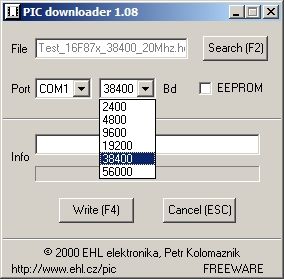
- Utilizzando il menu a tendina, selezionare la porta COM a cui è
collegato il cavo seriale :
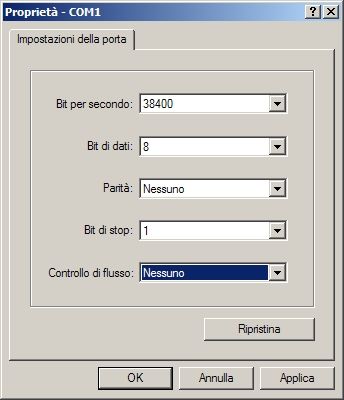
- Selezionare la velocità di trasmissione impostandola a 38.400 baud :
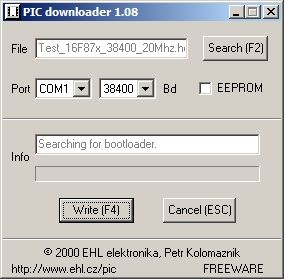
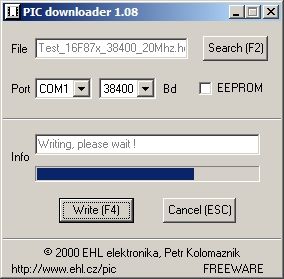
- Premere il tasto Write (F4) per avviare la fase di scrittura. Il
programma aprirà la porta di comunicazione e si metterà in attesa di
ricevere dal Bootloader caricato sul PIC, i caratteri che daranno il via
al trasferimento del firmware. Nella finestra di PIC_downloader apparirà
la scritta "Searcing for bootloader" :
- A questo punto ( e solo a
questo punto ! ) dare alimentazione al robot : se tutto
funziona correttamente, inizierà il trasferimento del programma di prova
dal PC al PIC.
La percentuale di dati trasferiti verrà evidenziata da
una barra scorrevole :
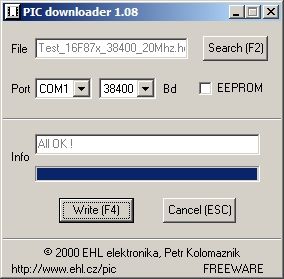
- A trasferimento completato apparirà la scritta : "All OK !" :
2. Esecuzione del test sulla porta RS232
Il
caricamento del programma di test ci ha già dato una conferma importante
sia sul corretto funzionamento del microcontrollore che del circuito
relativo alla porta RS232 ( MAX232 ) ; la sua esecuzione
completerà le verifiche di questo sottosistema.
Il test prevede la
ricezione di una sequenza di caratteri ( la parola ALIVE ) generati dal
PIC e trasmessi sulla seriale.
Useremo il terminale seriale di
Windows ( HyperTerminal ) :
- Dal menu di Windows, lanciare HyperTerminal :
START >>
Programmi >> Accessori >> Comunicazioni >>
HyperTerminal
- All'apertura il programma ci chiede di dare un nome alla
connessione. Chiamiamola Tobor e confermiamo con OK :
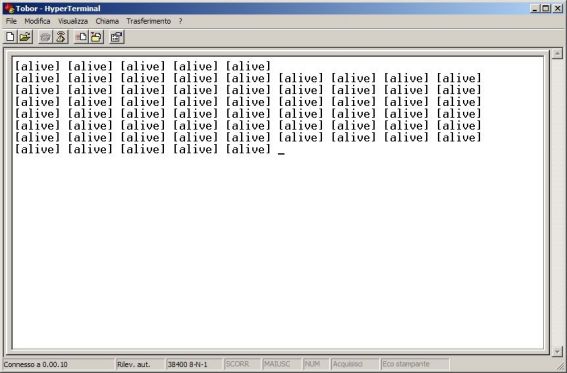
- Hyperterminal è connesso e pronto a
ricevere i dati
- Accendere l'alimentatore. Se tutto funziona correttamente,
Hyperterminal inizierà immediatamente a ricevere i dati trasmessi dal
PIC. Il programma prevede l'invio di una testata con i dati di
configurazione e, successivamente, l'invio ripetuto a intervalli
regolari della stringa [ALIVE] :
- Al termine della prova spegnere l'alimentatore e chiudere
HyperTerminal, salvando la connessione Tobor che utilizzeremo di nuovo
in seguito.
Complimenti !!
Il
Microcontrollore PIC16F876A e la porta seriale RS232 funzionano
correttamente !
|