| Descrizione:
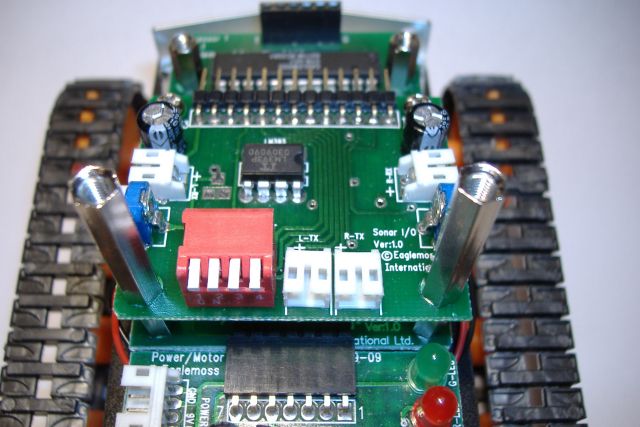
La scheda sonar in/out realizzata in vetronite a doppia faccia delle
dimensioni di 48x40 mm riporta la scritta "Sonar I/O Ver:1.0"
sul lato componenti.
La scheda era allegata al fascicolo n°14 dell'opera
Cybot della
De
Agostini.
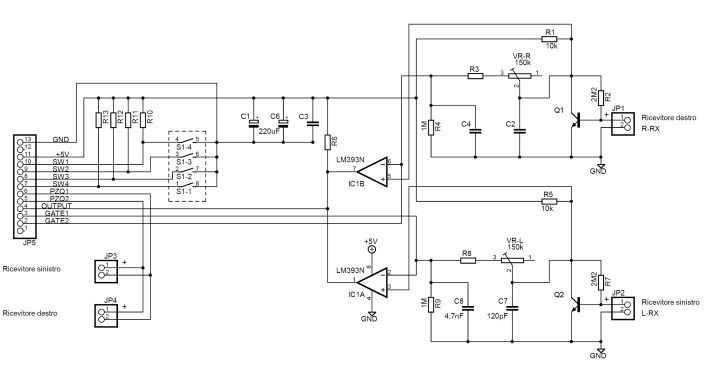
La scheda è utilizzata principalmente per connettere i sensori ultrasonici al microprocessore presente sulla
scheda Processore 2.
I ricevitori ultrasonici hanno un'uscita molto bassa che richiede un'amplificazione e una
filtrazione, questa è realizzata in maniera molto grezza e usa un solo amplificatore realizzato con un transistor per ogni canale (Q1 e Q2), con la sola filtrazione realizzata con un condensatore da 120pF, condensatori C2 e C7.
Il microcircuito usato sulla scheda è un LM393, un "Doppio comparatore differenziale", le uscite dei due comparatori sono sommate insieme con una resistenza comune di "pull-up" (R6) e sono collegate al
processore presente sulla scheda Processore 2.
L'altra funzione della scheda Sonar I/O è quella di montare uno 'switch'
a 4 quattro posizioni questo è collegato alle porte del microprocessore
presente sulla scheda Processore 2.
I trasduttori ultrasonici si collegano ai quattro connettori presenti
sulla scheda due trasmittenti e due ricevitori, questi sono fondamentalmente
dei minuscoli altoparlanti e piccoli microfoni, ma lavorando al di fuori
delle capacità uditive umane.
Infatti sono progettati per lavorare ad una frequenza specifica (chiamata
frequenza di risonanza) di circa il 40KHz e vengono forniti in coppie.
Il Sonar lavora molto semplicemente,
viene emesso un segnale dalla capsula trasmittente e si aspetta il segnale
dalla capsula ricevente, il tempo che impiega il segnale a ritornare,
tanto più corto sarà questo tempo più vicino sarà l'ostacolo.
Viking è fornito di due coppie di trasduttori (una sul lato destro e una
sul lato sinistro).
|
 |