![]()
Robot SONIC
ultimo aggiornamento 8 agosto 2018
|
|
Robot SONIC ultimo aggiornamento 8 agosto 2018 |
|
|
|
Indice
Robot SONIC;
D.A.M.
BROS ROBOTICS,
è un'associazione
fondata dai tre fratelli
D'Ambrosi: Mauro, Marco e Donato, il gruppo è nato dalla passione
per la tecnologia. Il loro obbiettivo è quello di sviluppare nuove
soluzioni di automazione, robotica di servizio ed elettronica
indossabile, con particolare attenzione al sostegno per le persone con
disabilità.
Tra le loro attività troviamo anche la realizzazione di Corsi e Workshop
per la divulgazione della robotica. Proprio per la realizzazione
dei corsi, la D.A.M. BROS,
ha creato due piccoli robot della serie assemblabile, realizzati in kit
di sviluppo.
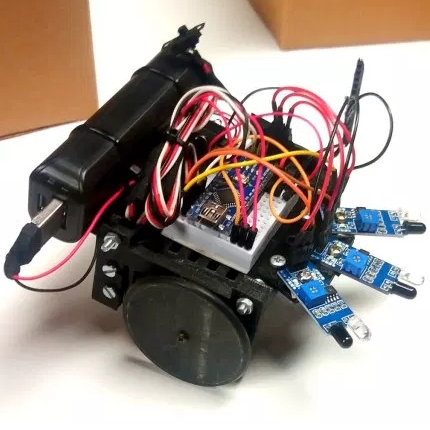
Sono disponibili vari modelli di robot, i loro nomi sono SONIC e RED EYES,
RED ANT , il loro nome deriva dal tipo di sensori di cui sono dotati, un modulo
ad ultrasuoni per
SONIC tre moduli ad infrarossi
(IR FC-51)
con uscita digitale per RED EYES, tre moduli infrarossi
per il line following per
RED ANT, che permettono ai robot di
orientarsi in un ambiente con ostacoli, permettendogli poi di
trovare la strada libera. In via di elaborazione il robot TOUCH
dotato di microswitch.
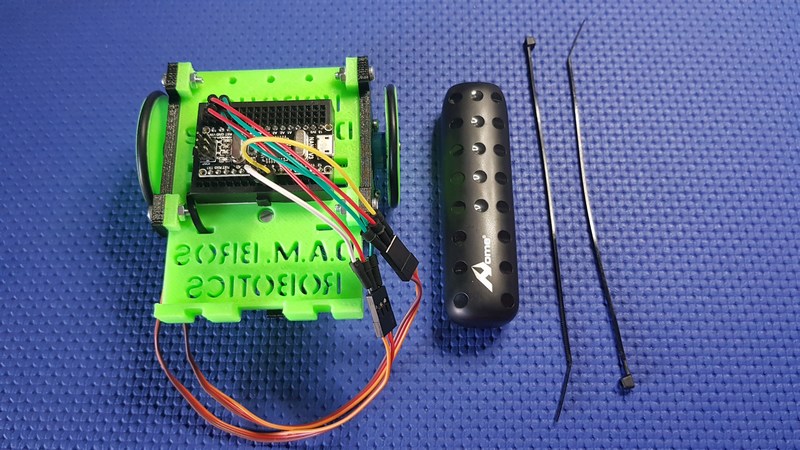
Tutti sono equipaggiati con una scheda Arduino Nano ed
alimentati da una Powerbank.

|
Robot SONIC |
Robot RED EYES |
 |
 |
| Robot RED ANT | ROBOT TOUCH |
 |
 |
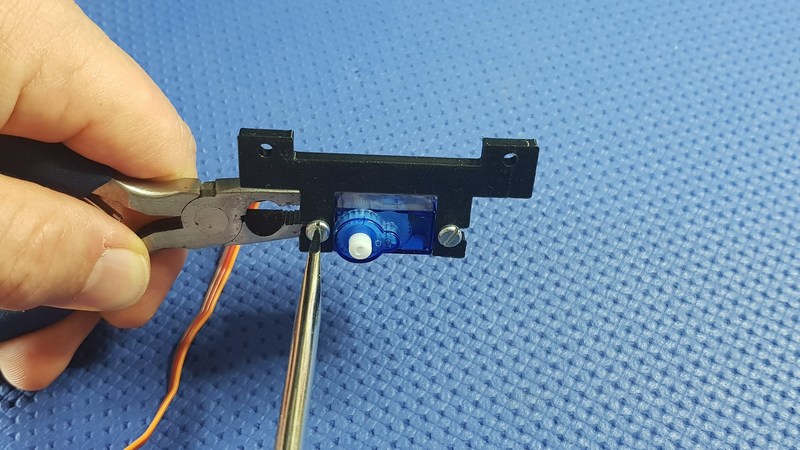
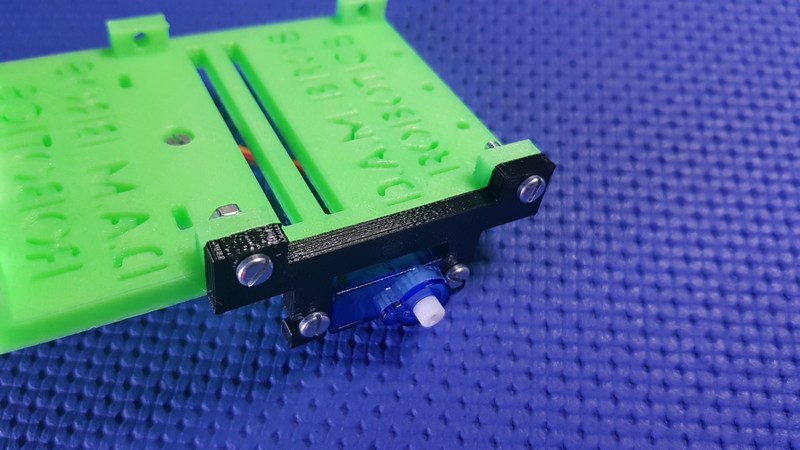
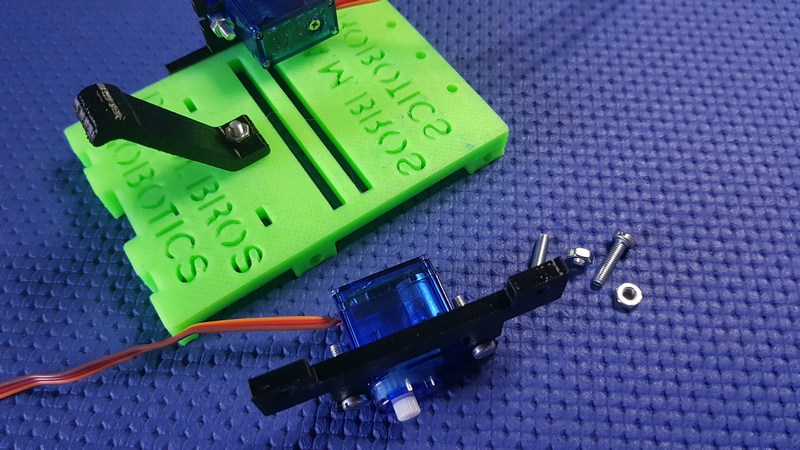
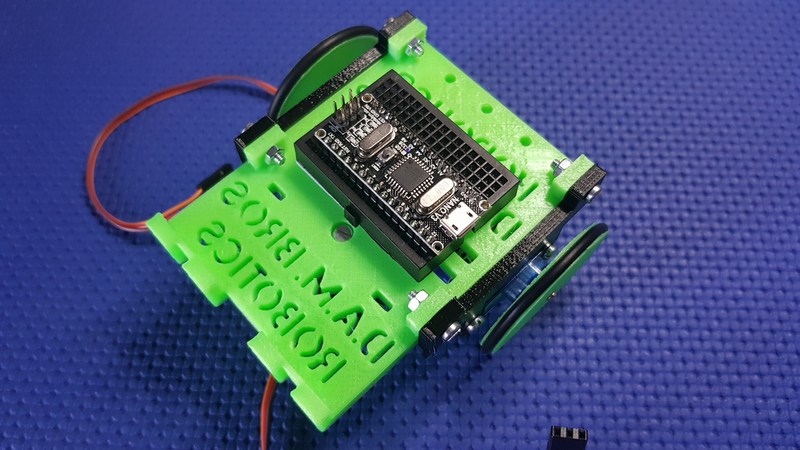
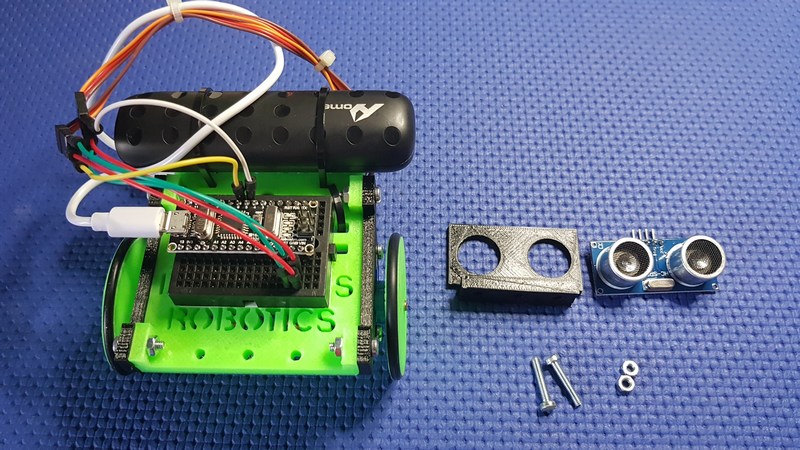
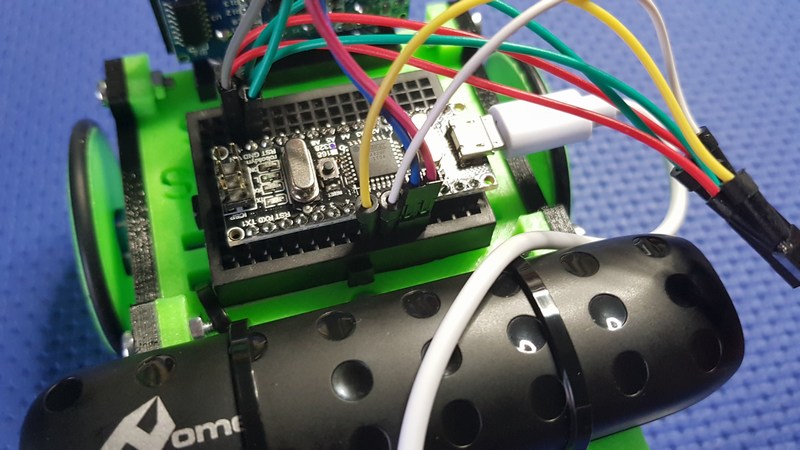
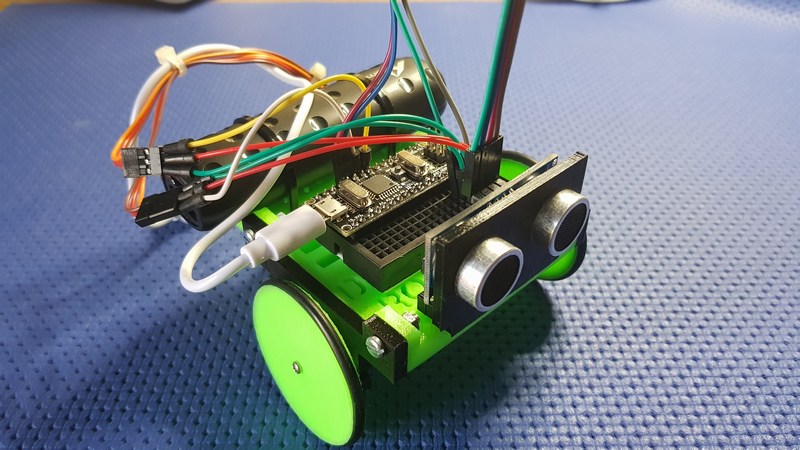
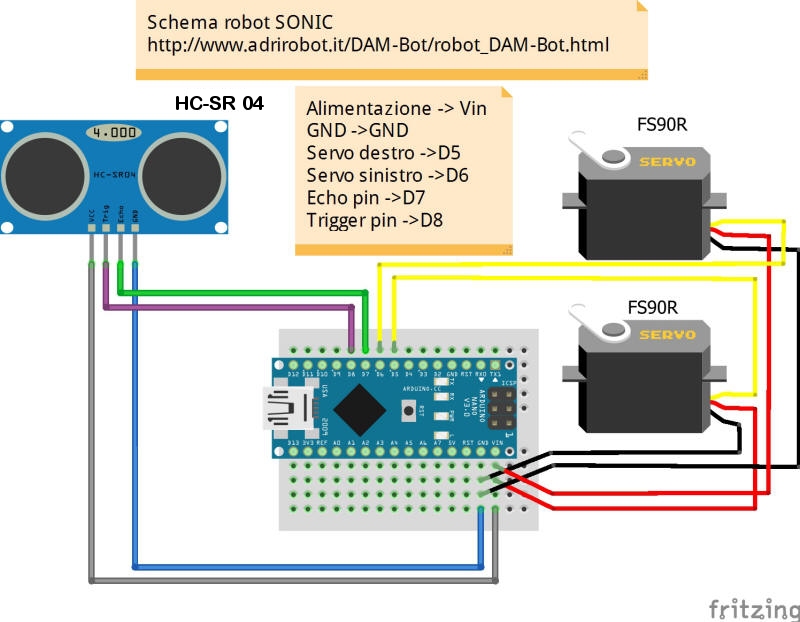
Vediamo ora il robot SONIC, il suo corpo è stampato in 3D, dotato di due servomotori a rotazione continua e due ruote con pneumatici in gomma piena che gli permettono di andare in giro con rapidità e silenziosità, il sensore di cui è dotato è di tipo sonar modello HC-SR04.
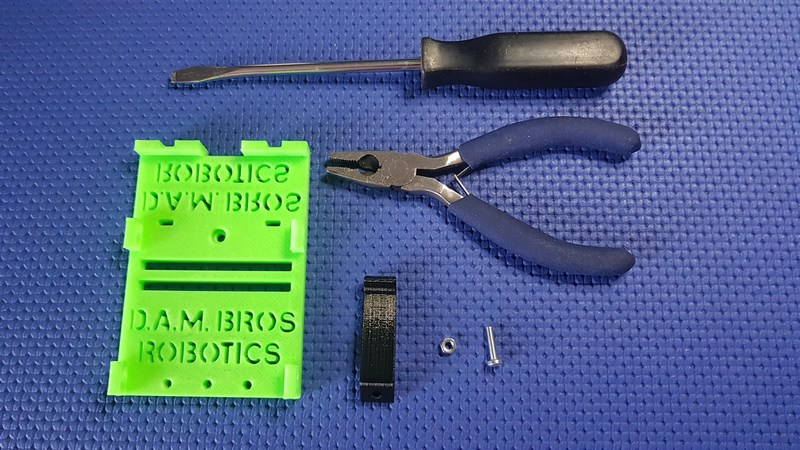
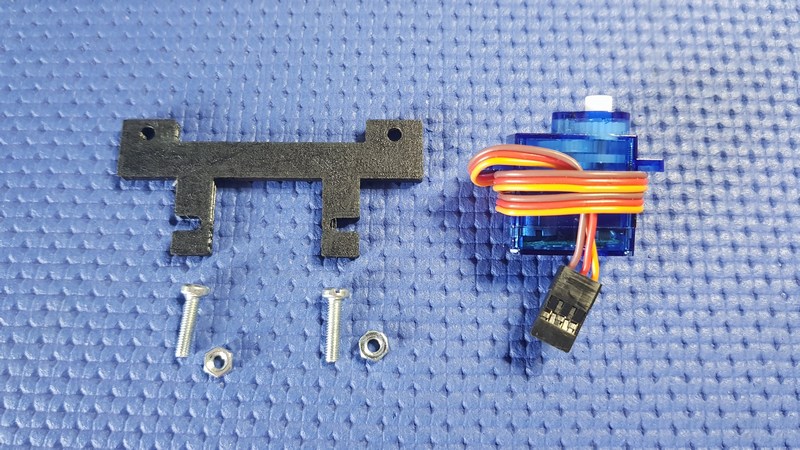
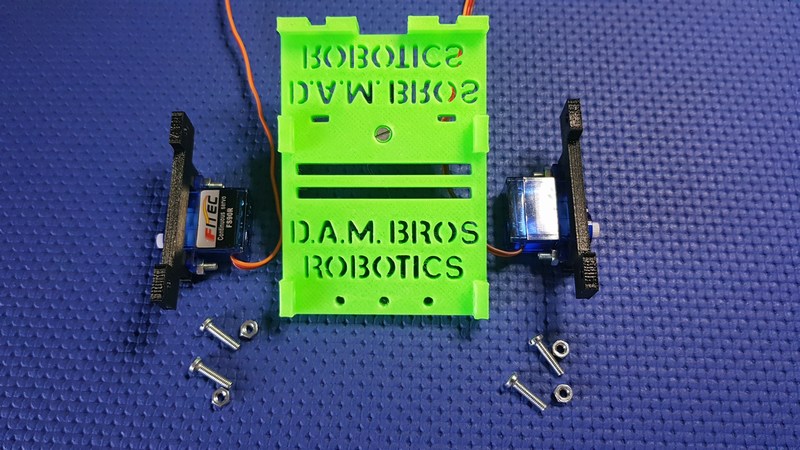
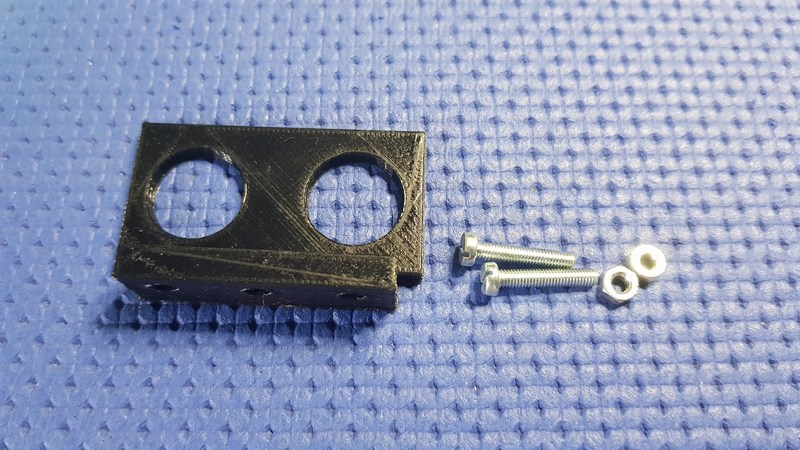
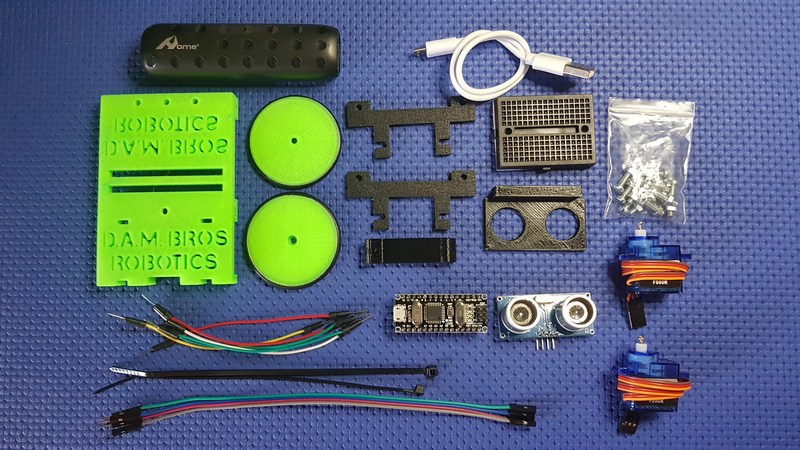
Scheda dei componenti del KIT SONIC
|

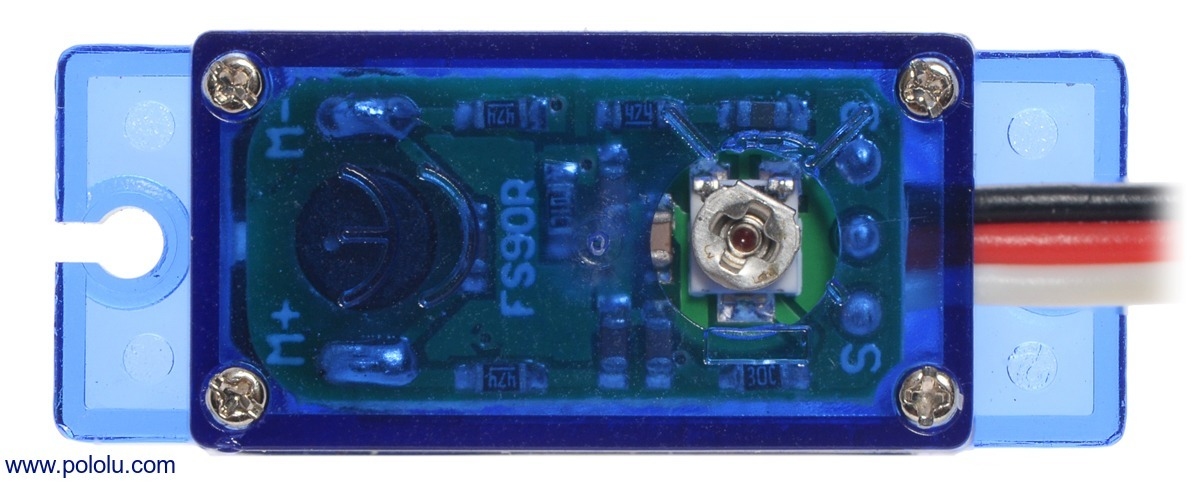
Servomotore a rotazione continua FS90R
L'FS90R è un micro servo realizzato da
FEETECH RC Model Co.,Ltd.
(Vedere
link) appositamente per la rotazione continua, offrendo un modo economico e
semplice per far muovere piccoli robot.
A 6
V, ha una velocità di rotazione massima di circa 130 giri / min (senza carico) e
può produrre fino a 1,5 kg-cm di coppia. Il servo può essere controllato
utilizzando una connessione diretta a una singola linea di I/O del
microcontrollore senza alcuna elettronica aggiuntiva, che lo rende un ottimo
attuatore miniaturizzato per progetti di robotica per principianti; basta
inserire un paio di ruote e il tuo robot è pronto a rotolare!
Il servo di rotazione continua FS90R converte gli impulsi di posizione servo RC
standard in velocità di rotazione continua. Il punto di riposo predefinito è 1,5
ms, ma può essere regolato utilizzando un piccolo cacciavite per ruotare il
potenziometro di regolazione del punto medio.
Le larghezze dell'impulso sopra il
punto di riposo determinano una rotazione in senso antiorario, con aumento della
velocità all'aumentare della larghezza dell'impulso; le larghezze dell'impulso
sotto il punto di riposo determinano una rotazione in senso orario, con una
velocità crescente al diminuire della larghezza dell'impulso.
 |
 |
Caratteristiche del servo
|
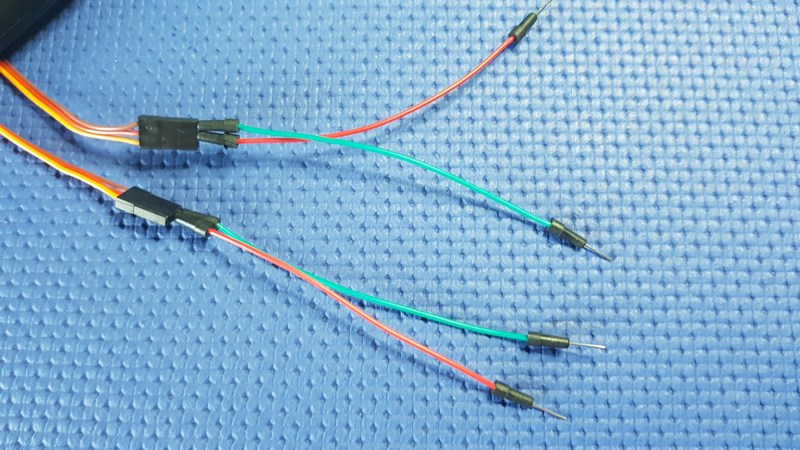
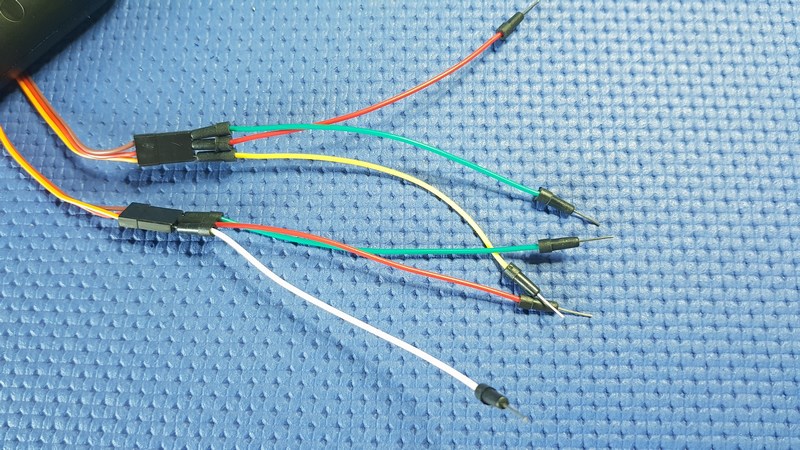
Il servo ha un cavo da 250 mm terminato con un connettore di tipo JR , il codice dei coli dei cavi è
|

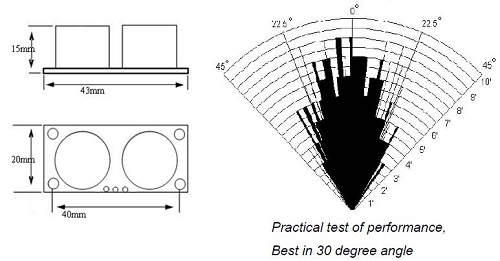
Il sensore ad ultrasuoni HC-SR04, ha un campo di misura che si estende da due centimetri a quatto metri e la precisione arriva a 1 cm. Il modulo comprende il trasmettitore a ultrasuoni, il ricevitore e il circuito di controllo.

|
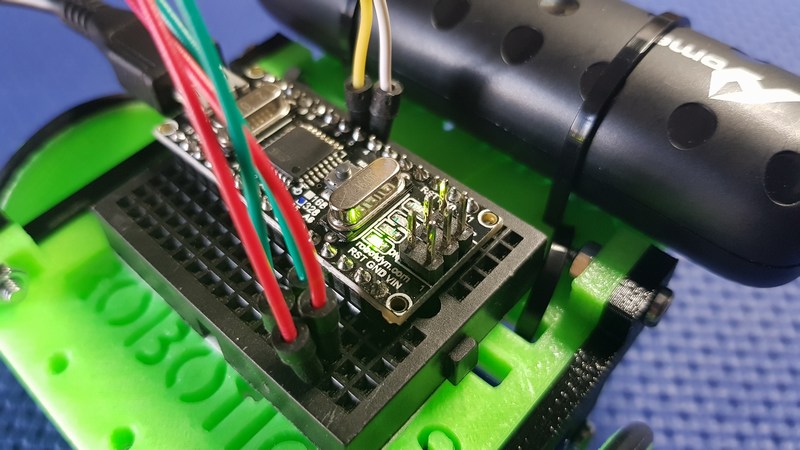
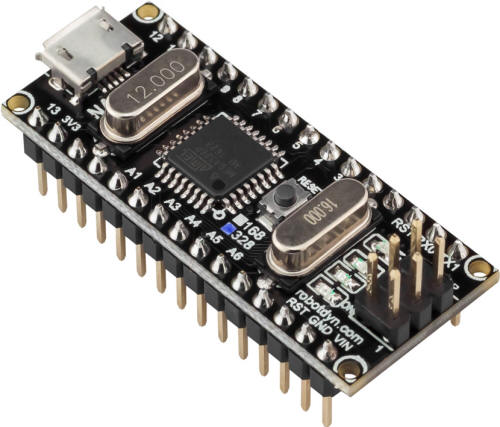
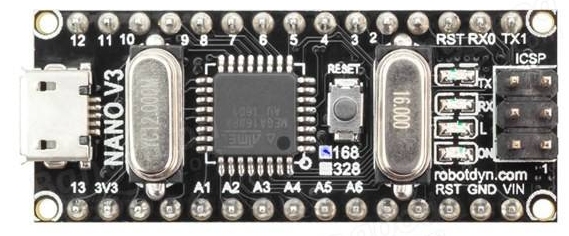
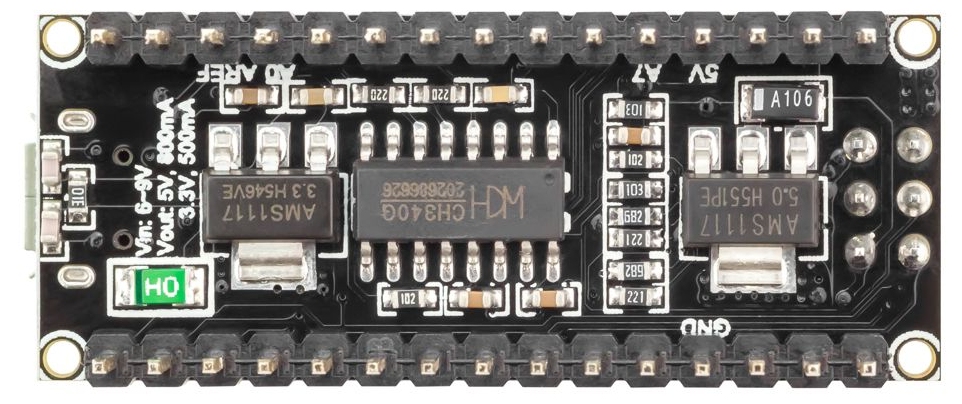
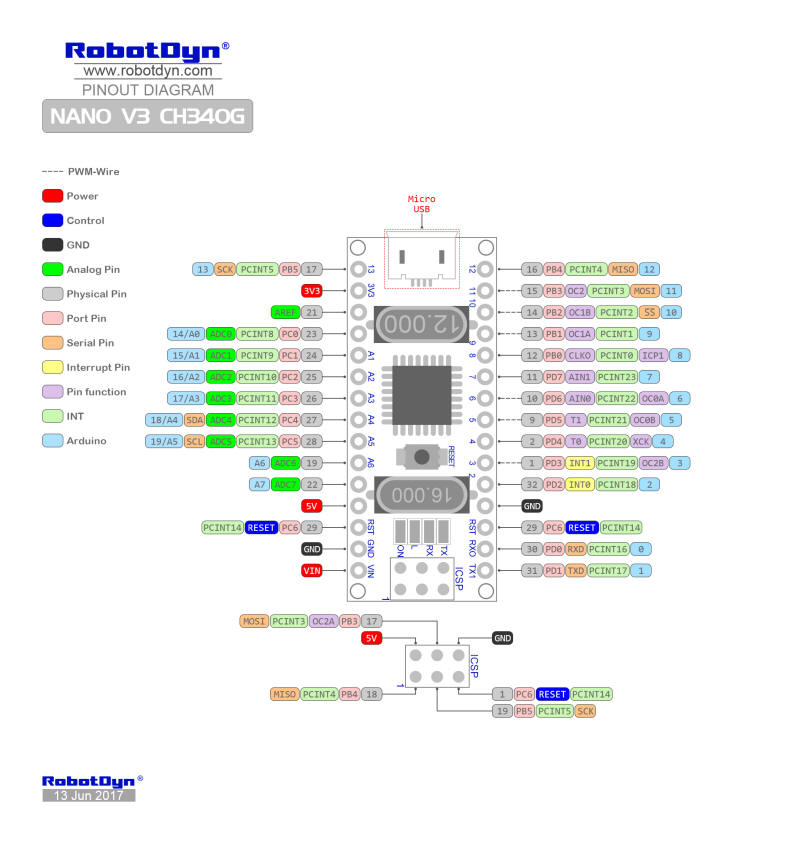
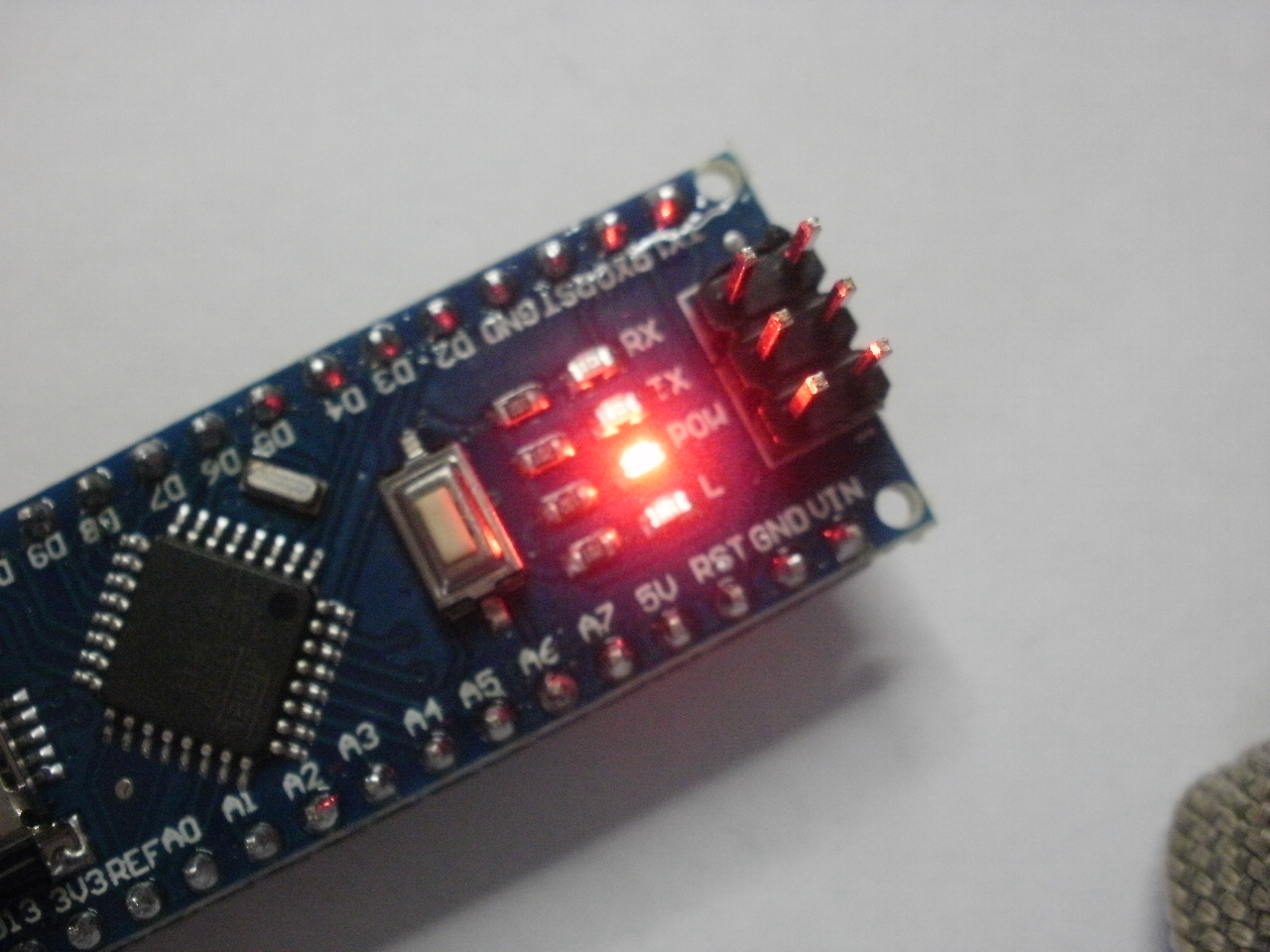
Scheda di controllo RobotDyn® Nano V3
ATmega 328 costruito sul microcontrollore ATmega328
(16MHz), la scheda utilizza un chip CH340G come
convertitore UART-USB. con una frequenza di funzionamento a 12MHz.
La scheda può essere alimentato tramite la micro porta USB (fino a 500mA),
oppure con alimentazione esterna 6-12V regolamentata all'uscita VIN, o una fonte
di alimentazione esterna 5V ad sul pin +5V, l'alimentazione viene selezionata
automaticamente.
Per altre informazioni più dettagliate della scheda vedere la
pagina a lei dedicata
|
| CH340G USB to serial chip | ||
 |
|
 |
| Piedinatura | Datasheet | Foto dell'integrato |
| Processore ATmega328 8-bit Microcontroller with 32K Bytes In-System Programmable Flash | ||
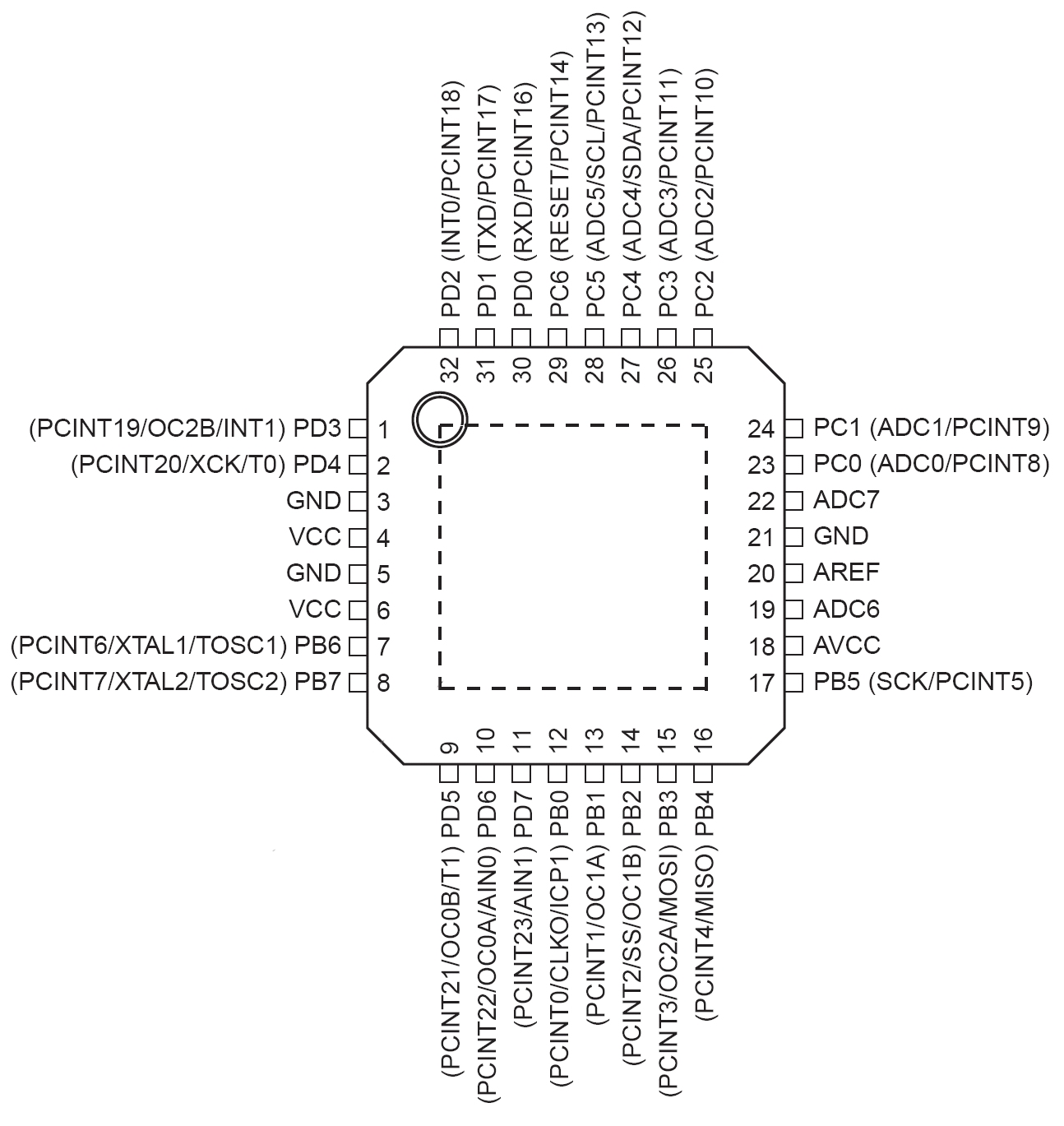 |
 |
 |
| Piedinatura | Datasheet | Foto dell'integrato |
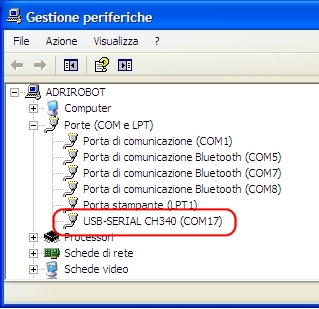
Installazione del driver CH340G
Come spiegato la scheda utilizza come convertitore USB-seriale il chip CH340G invece che il più diffuso chip di FTDI, siccome Windows non supporta nativamente questo chip, il modulo non viene riconosciuto.
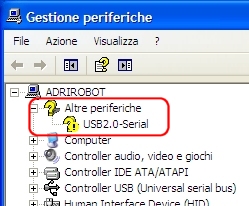
Per questo motivo è necessario scaricare il driver dal sito ufficiale del fornitore (sfortunatamente è in cinese).Una volta eseguito l’unzip del pacchetto, è possibile procedere con l’aggiornamento del driver per la periferica:
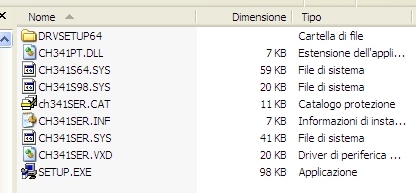
Per cui si dovrà lanciare il programma SETUP.EXE
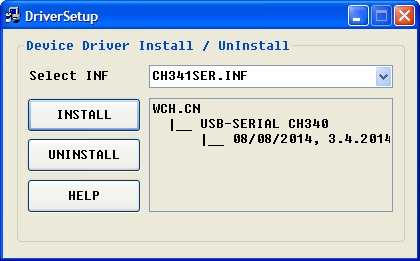
Dopo l'apertura della finestra si effettuerà
l'installazione dei driver, che avverrà in automatico premendo
INSTALL
A fine procedura sarà mostra la seguente finestra
A questo punto collegando il modulo, questo sarà riconosciuto e Windows configurerà correttamente la nuova porta COM
Il successo sarà anche rappresentato dal successo della programmazione di uno sketch di prova come "Blink" in cui il led L inizierà a lampeggiare
Per che avesse sistemi operativi diversi (Linux, Mac e Android) sul sito sono disponibili i relativi driver
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
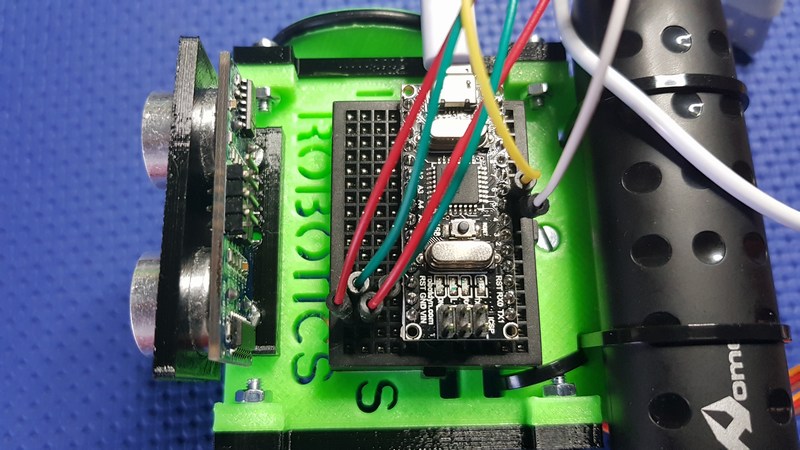
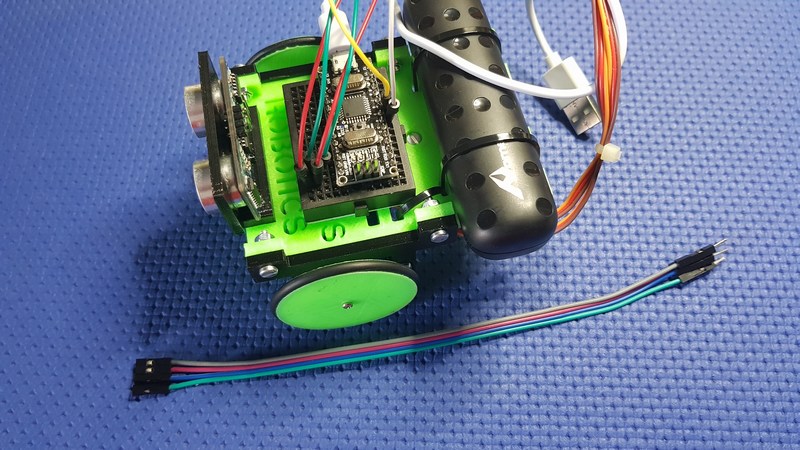
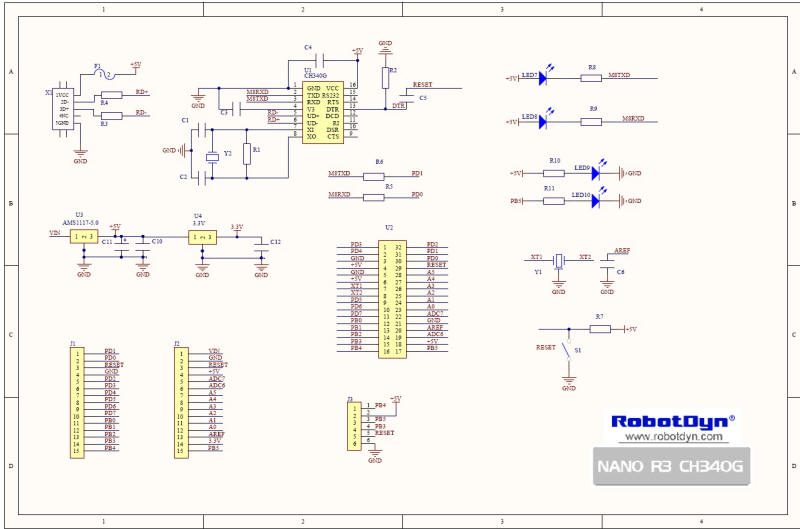
Lo schema dei collegamenti è riportato nello schema sotto stante
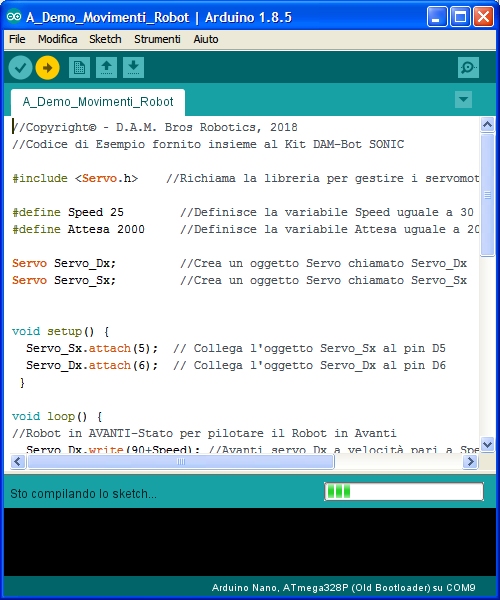
Con il kit del robot sono forniti dei semplici programmi che sono utilizzati per testare il robot e le sue parti e per un primo utilizzo in modo autonomo, questi programmi sono:
A_Demo_Movimenti_Robot - Esegue dei semplici movimenti quali avanti, indietro e rotazioni per verificare che i collegamenti siano stati effettuati correttamente
B_Calibrazione_motori - Utilizzabile nel caso fosse necessaria la calibrazione dei servo
C_Demo_Sensore_ultrasuoni - Verifica il funzionamento del sensore sonar del robot
D_Rover_ultrasuoni - Permette al robot di muoversi in autonomia evitando gli ostacoli
|
Elenco revisioni |
|
|
08/08/2018 |
Inserito filmato realizzato |
|
25/06/2018 |
Emissione preliminare |