Pixy2 CMUCam5
ultimo aggiornamento 8 marzo 2020
|
|
Pixy2 CMUCam5 ultimo aggiornamento 8 marzo 2020 |
|
|
|
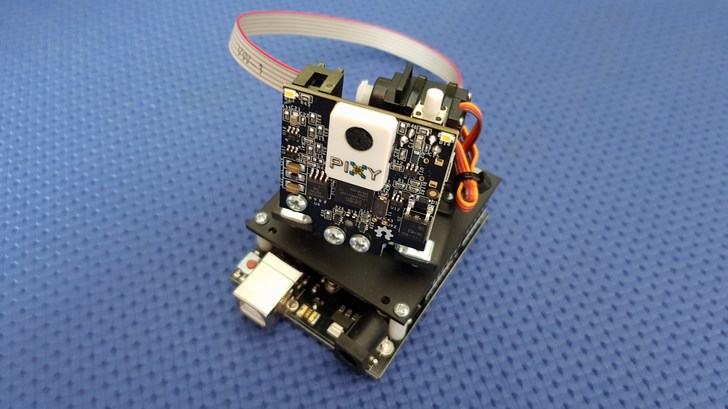
Pixy2 è una CMUcam, cioè un sensore di visione veloce per la robotica fai-da-te e applicazioni simili. E' possibile insegnare a Pixy2 a riconoscere un oggetto semplicemente premendo un pulsante.

LINK NUOVA VERSIONE DELLE PAGINA
È in grado di tracciare contemporaneamente centinaia di oggetti e
fornisce solo i dati che interessano.
Pixy2 ha algoritmi che rilevano e tracciano le linee da usare con i
robot che seguono la linea. I nuovi algoritmi sono in grado di rilevare
anche intersezioni e "segnali stradali". I segnali stradali possono dire
al tuo robot cosa fare, come girare a sinistra, girare a destra,
rallentare, ecc. E Pixy2 fa tutto questo a 60 frame al secondo, quindi
anche il tuo robot può essere veloce.


Sia la Pixy2 CMUcam5 sia il dispositivo Pan/Tilt per Pixy2 possono essere acquistati sul tipo SeeedStudio, il pacco potrà essere ricevuto tramite corriere oppure tramite posta ordinaria tracciabile.
![]()
Nella confezione è presente:
Il Sensore di immagine Pixy 2 CMUcam
Un cavo USB lungo 2 m
un cavo piatto a 6 cavi con due connettori FC-10P a FC-6P
una bustina contenente varia minuteria

|
Per utilizzare al meglio la CMUcam è disponibile uno speciale dispositivo Pan/Tilt Pixy2 facile da assemblare che da la possibilità a Pixy2 di guardarsi attorno. Nel kit è disponibile tutto l'hardware necessario.
La base Pan/Tilt si collega direttamente ad
un Arduino con schema fori compatibile con Arduino e include stand-off e
dispositivi di fissaggio.
Sono disponibili diverse demo di Pan/Tilt che possono essere eseguite da
Arduino, Raspberry Pi o stand-alone (senza controller).

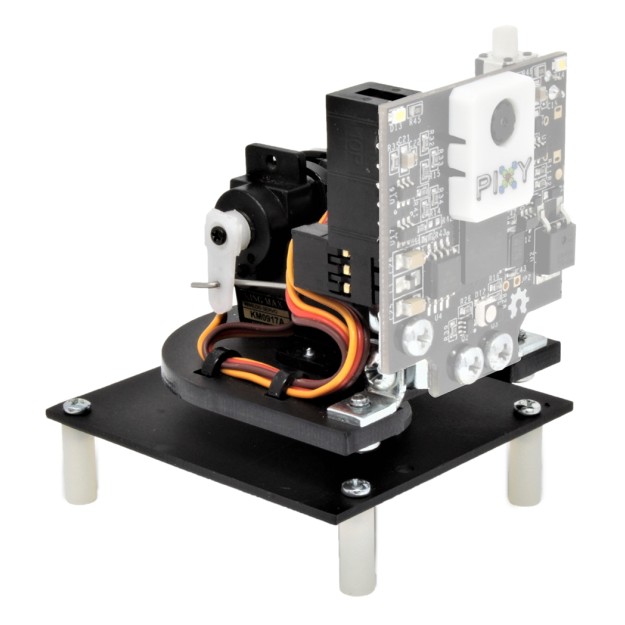
Montaggio del dispositivo Pan & Tilt
Seguono le fasi per l'assemblaggio del meccanismo Pan & Tilt, questo viene fornito in un kit, e richiede per il montaggio alcuni attrezzi quali:
Una tronchesina
Una piccoli pinza
Un cacciavite tipo Phillips ("a croce" o "a stella")

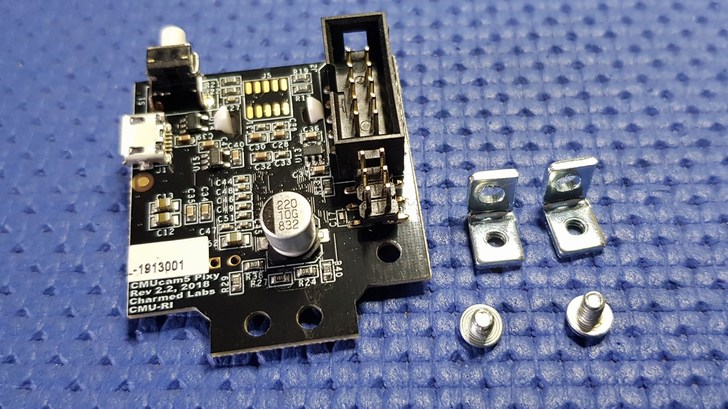
Tipi di elementi di fissaggio
Nel kit sono forniti vari tipi di elementi di fissaggio, utilizzare la figura seguente per aiutarvi a trovare il fissaggio a cui si fa' riferimento nelle istruzioni sottostanti.

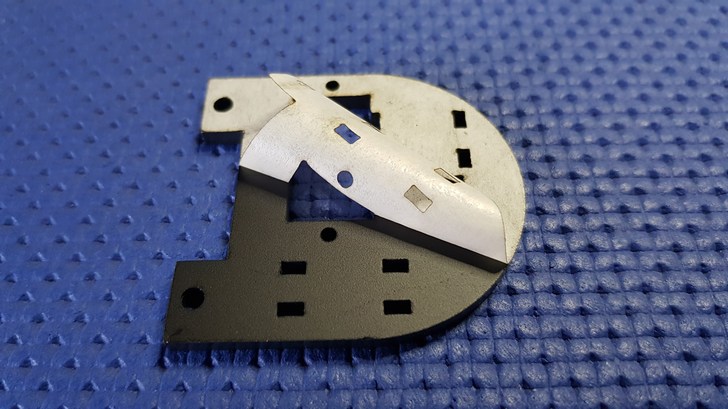
Recuperare una delle squadrette servo a forma di croce nel sacchetto del servo. E usare le tronchesine per tagliare tre delle gambe come mostrato. Mettere quinti da parte la squadretta modificata o montarla su uno dei servi per tenerla al sicuro.


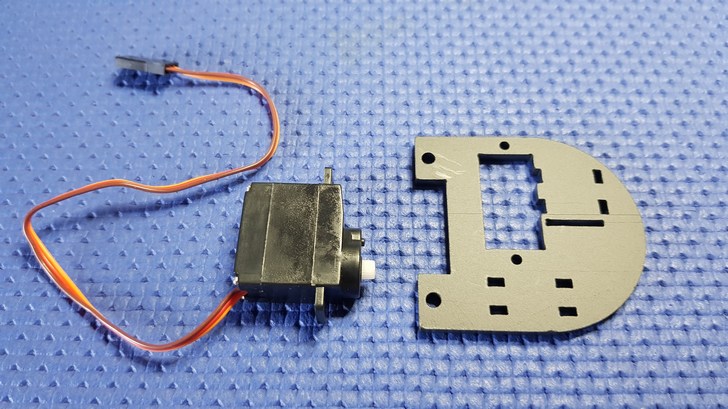
Rimuovere il supporto di carta dal pezzo di plastica "cornice" come mostrato.

Rimuovere uno dei servi dal suo sacchetto e fissarlo al telaio inserendo la sua flangia laterale nello slot del telaio come mostrato. La flangia del servo si adatta perfettamente alla fessura e richiede una certa forza. Questo sarà il servo di inclinazione TILT

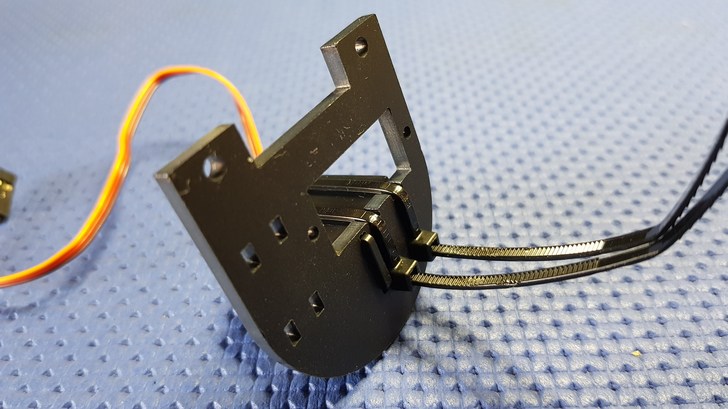
Capovolgere il telaio e fissare il servo tramite una delle fascette fermacavo come mostrato.
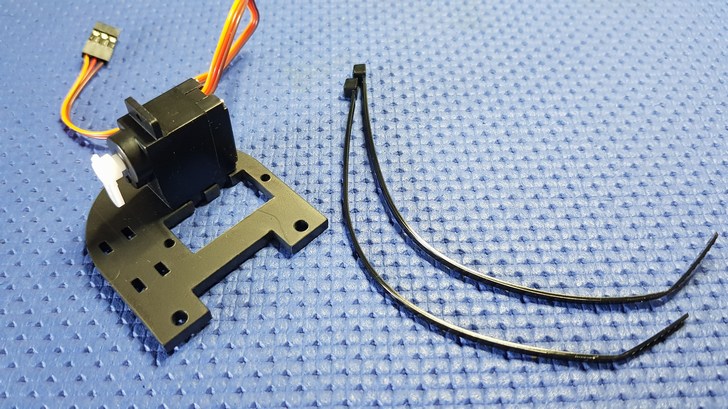
Inserire una seconda fascetta fermacavo e serrare prima a mano e poi utilizzando le pinze per serrare le fascette tirando le estremità dei ferma cavi tirando.
Rimuovere il secondo servo dal suo sacchetto e inserirlo nel foro nel telaio come mostrato. Questo sarà il servo della rotazione PAN.

Attaccare il servo al telaio usando due viti autofilettanti lunghe, facendo attenzione a non stringere troppo, il che potrebbe rovinare la plastica.

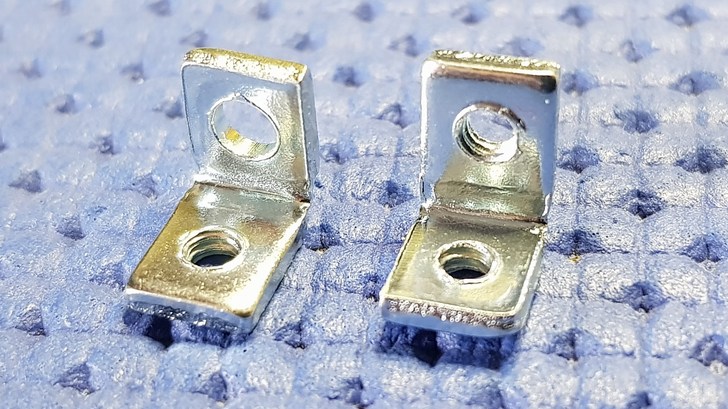
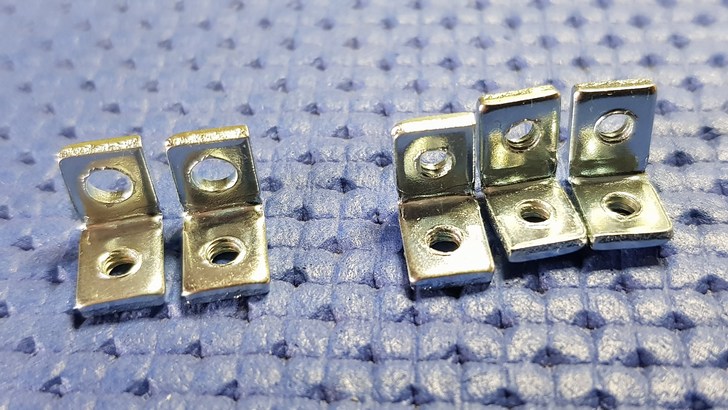
Prendete tutte e cinque le squadrette rettangolari in metallo ed esaminatele.
Noterete che due di loro hanno un solo forno
filettato (a sinistra) e tre di loro hanno due fori filettati (a destra).
Chiameremo queste squadrette a un foro e a due fori rispettivamente.
Procedete e separate questi due tipi di squadrette in due gruppi
per semplificare le cose.
Prendete una squadretta a due fori, utilizzando una vite filettata 4-40 lunga
Avvitate la squadretta al telaio come mostrato. Fissate anche l'altra squadretta a due fori dall'altra parte del telaio con un altra vite lunga 4-40
Prendete ora le due squadrette ad un foro e due viti filettate 4-40 corte.
Fissate ora le due squadrette come mostrato

Prende ora due boccole di nylon

e inseritele nei fori non filettati in queste staffe come mostrato.

Prendere due viti filettate 4-40 lunghe
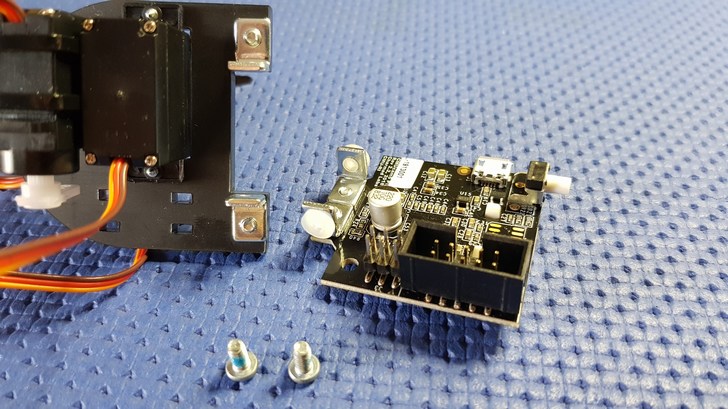
Inserire la scheda Pixy2 tra le squadrette sul telaio come mostrato e fissatela
con le due viti.
Nota: le due viti non servono per fissare la scheda ma fungono da cerniera
permettendo la rotazione della scheda. Potrebbe essere necessario allentare gli elementi di
fissaggio in modo che la scheda ruoti liberamente.
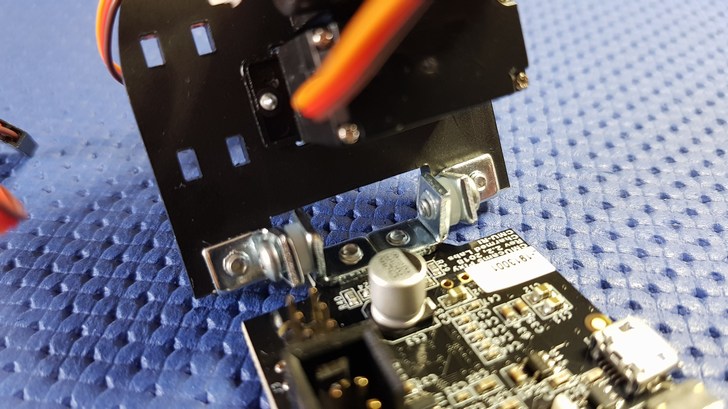
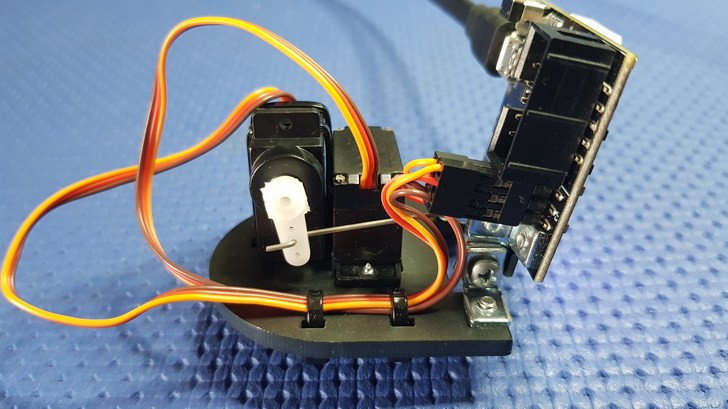
Piegare l'asse di inclinazione di Pixy2 fino in fondo come mostrato. Ed accertarsi che tutto sia in asse, se questo non fosse , per esempio Pixy2 è storto, allentare i fermi che fissano le staffe e regolarle fino a quando le cose non sono ben quadrate, quindi stringere nuovamente
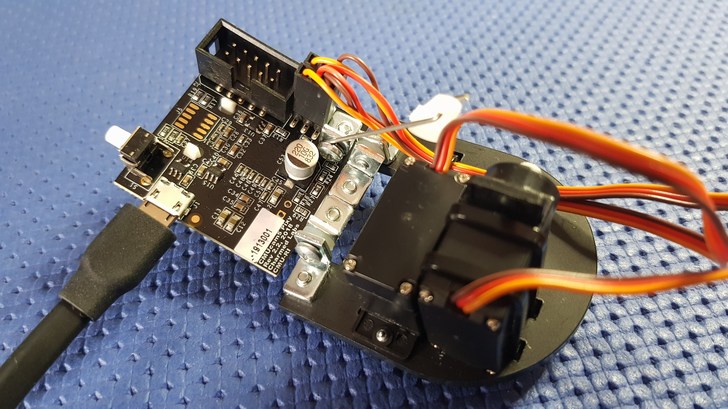
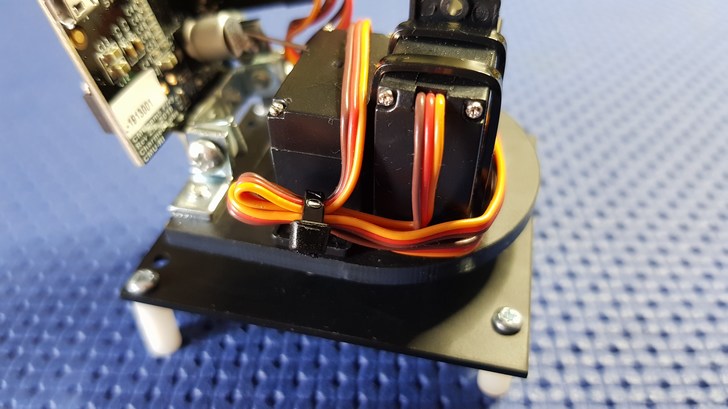
Collegare i cavi del servo al connettore servo di Pixy". Guardando il retro di Pixy2, il servo di Pan (rotazione) va sul lato sinistro del connettore; il servo di Tilt (inclinazione) si trova sul lato destro del connettore. Si ricorda che l'asse di inclinazione, è quello che viene tenuto fissato dalle fascette fermacavo

Utilizzare sue fascette per fissare i cavi come mostrato.
Assicurarsi che i cavi siano abbastanza allentati affinché Pixy2 possa
inclinarsi completamente prima di stringere definitivamente i le fascette.
Non stringere
comunque eccessivamente le fascette poiché si potrebbero danneggiare i fili.
Infine utilizzare le tronchesine per rimuovere le estremità delle fascette come
mostrato.

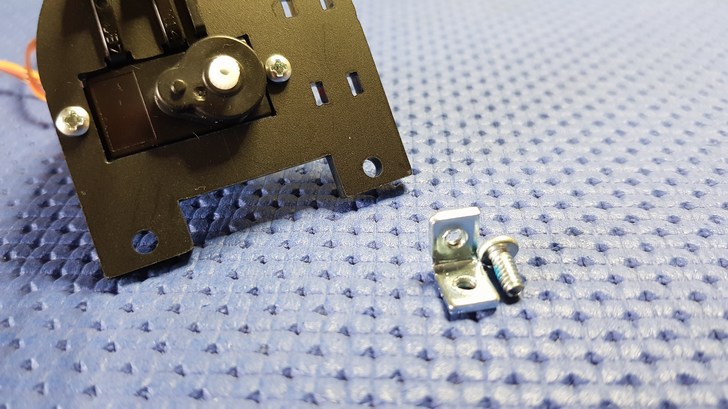
Recuperare una vite 4-40 corta, l'asta di spinta e una squadretta a 2 fori,
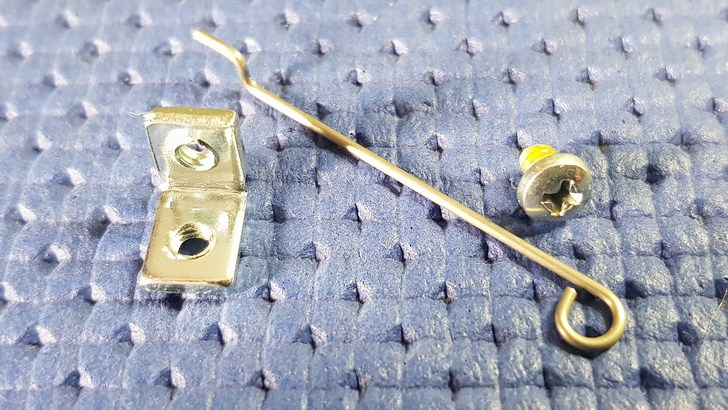
Collegare l'asta di spinta alla squadretta con la vite come mostrato con la
gamba più lunga della staffa che riceve il dispositivo di fissaggio.
Controllare l'orientamento dell'asta di spinta assicurandosi che sia come nella
foto e non sia "capovolto".
Non stringere troppo la vite per fare in modo che l'asta di spinta sia libera di ruotare attorno all'albero di
fissaggio.

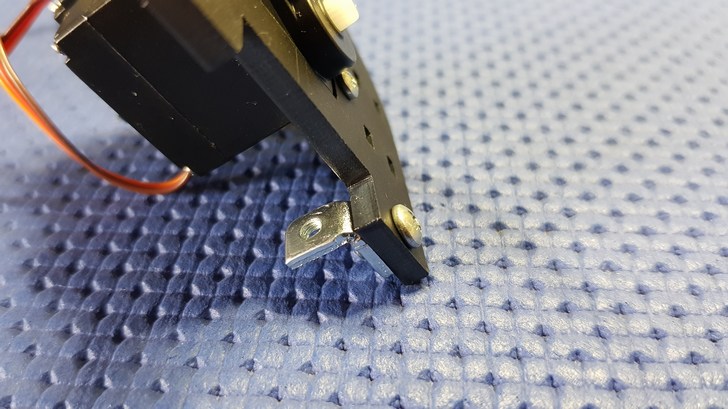
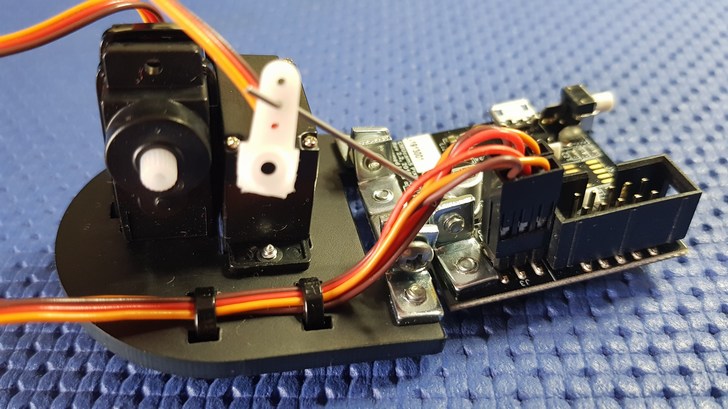
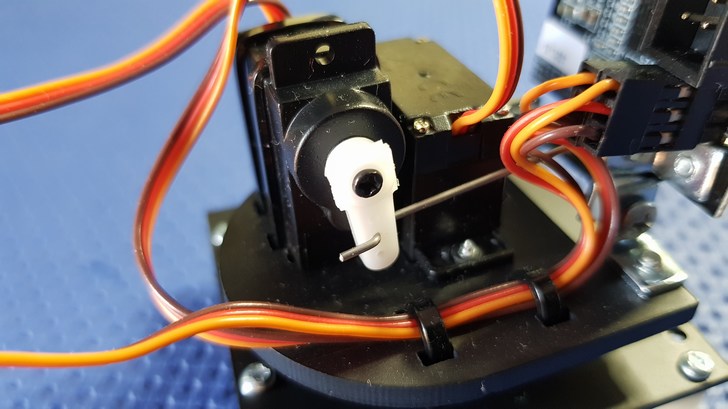
Infilare l'altra estremità dell'asta di spinta nel squadretta del servo modificato come mostrato. Dei tre fori presenti, inserite l'estremità dell'asta nel foro centrale.

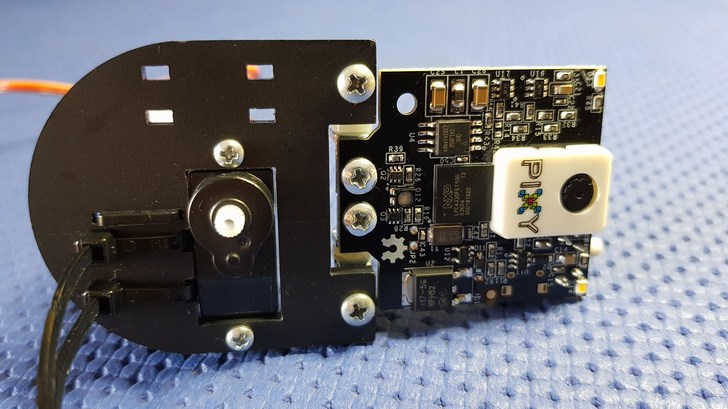
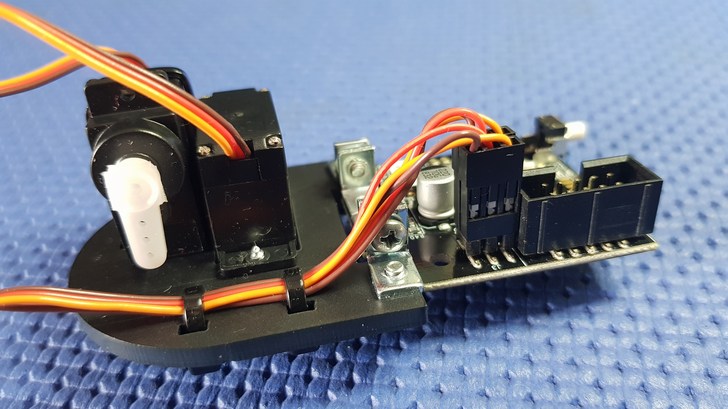
Allineare l'asta di spinta e la sua staffa su Pixy2 come mostrato.
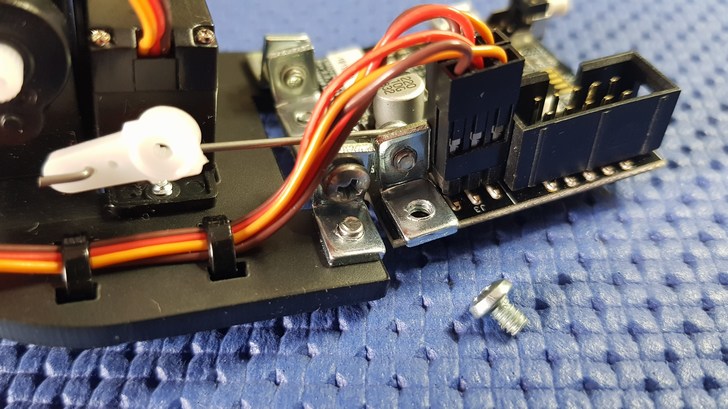
Utilizzare una vite filettata 4-40 corta per fissare il dispositivo di fissaggio a Pixy2 come mostrato.
Inserisci il cavo USB presente nel KIT di Pixy2 per PC per consentire a Pixy2 di alimentare e "azzerare" i servi.
Lasciando il cavo USB inserito, inserire la squadretta del servo di inclinazione sull'albero di rotazione del servo, le due parti si dovrebbero trovare come mostrato.
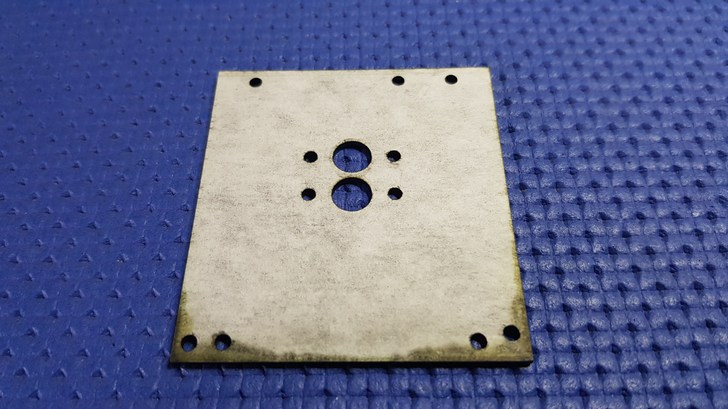
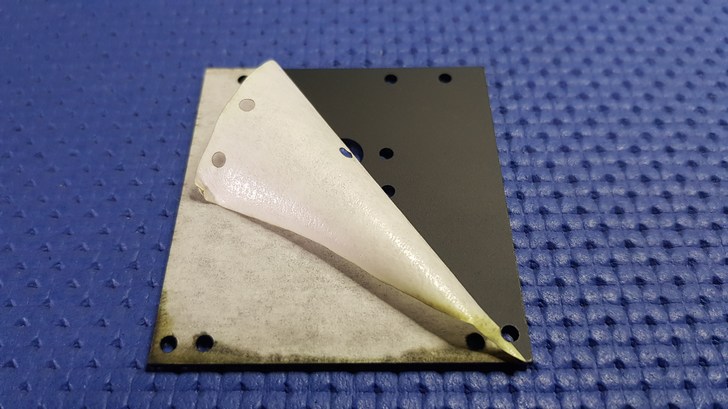
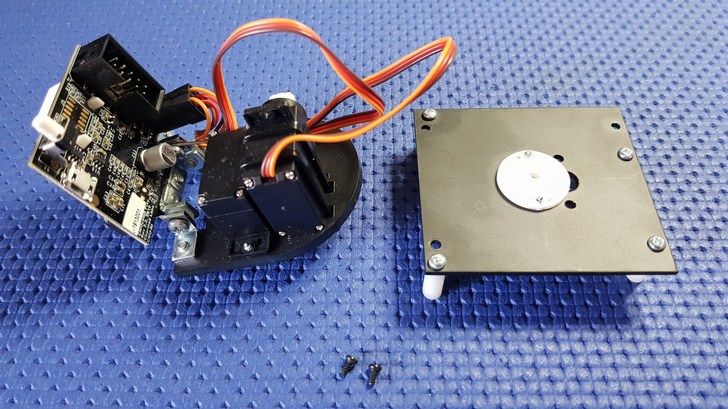
Eliminare la carta di protezione dal retro della base della brandeggio orizzontale.
Recuperare una squadretta tonda del servo e due viti autofilettanti corte
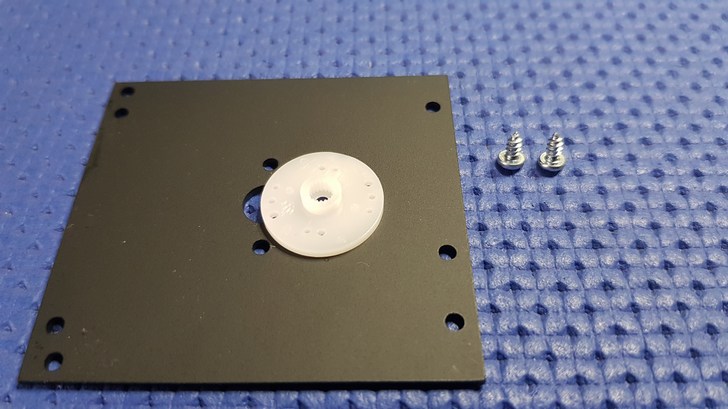
Allineate la squadretta su una delle due possibili
posizioni sulla base della brandeggio orizzontale.
Si potrebbe preferire di montare la squadretta centrata se si sta usando il meccanismo di brandeggio orizzontale su
un piano (per esempio), o si può spostare la squadretta fuori
centro se si prevede di montare il meccanismo di brandeggio orizzontale su un robot.
La posizione decentrata consente a Pixy2 di guardare più efficacemente oltre il bordo
della base.
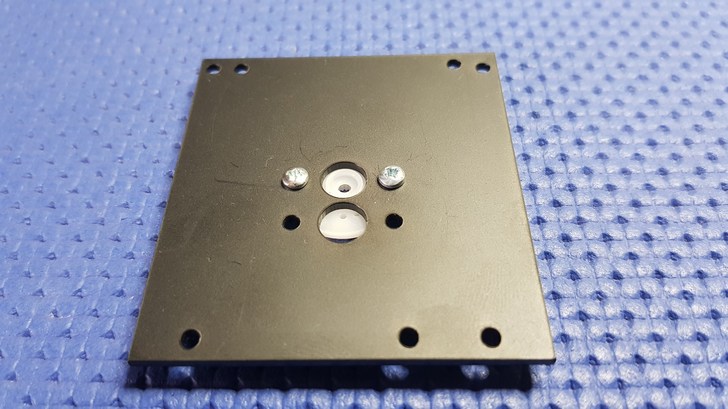
Recuperare i quattro sostegni in nylon e quattro viti filettati 2-56 per fissare i supporti alla base della brandeggio

Fissarle alla base come mostrato

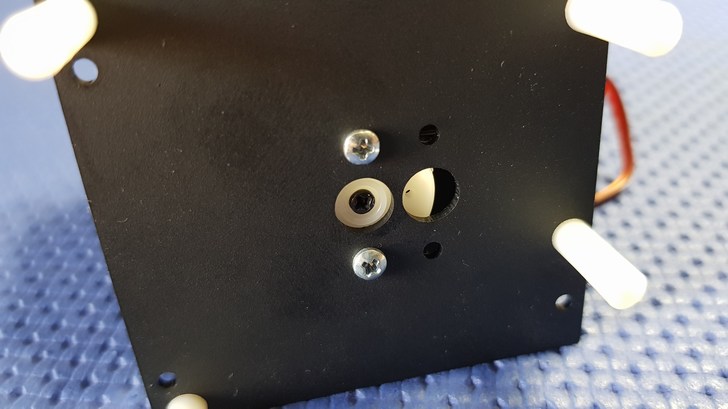
Nota: la piastra di base ha due modelli di fori per attaccare i distanziali, a seconda di dove si montano permettono per esempio di fissare il dispositivo ad Arduino in due modi diversi, vedere sotto

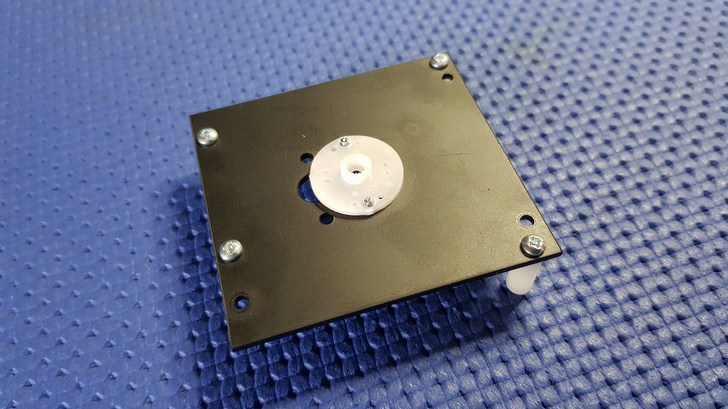
Recuperare le viti autofilettanti nere (che si trovano nei sacchetti del servo) per il fissaggio delle squadrette dei servo
Fissare la base al servo come mostrato.
Usare l'altra vite per fissare la squadretta del servo di inclinazione
Usare una fascetta stingi cavi per fissare meglio i cavi
Recuperare il cavo piatto dalla scatola del Kit di Pixy2
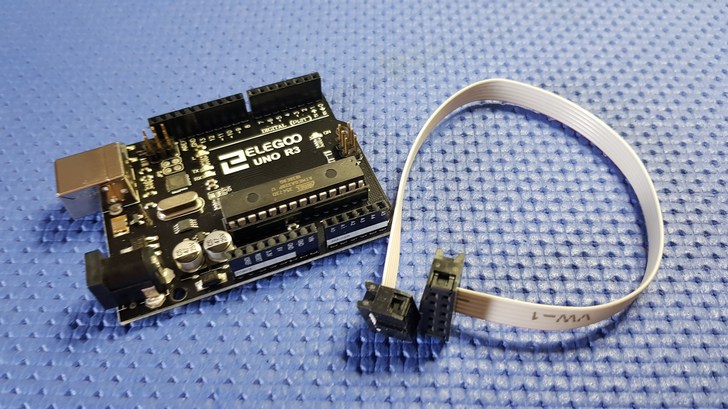
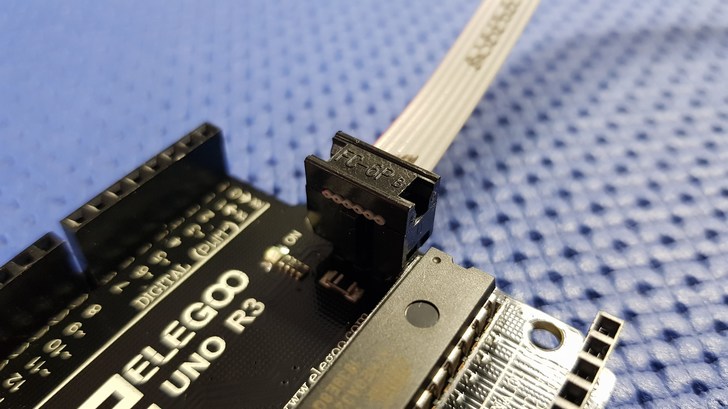
Fissare il connettore a 6 pin sul connettore ICSP di Arduino come mostrato
Recuperare le quattro viti filettati 2-56 per fissare i supporti alla base della brandeggio
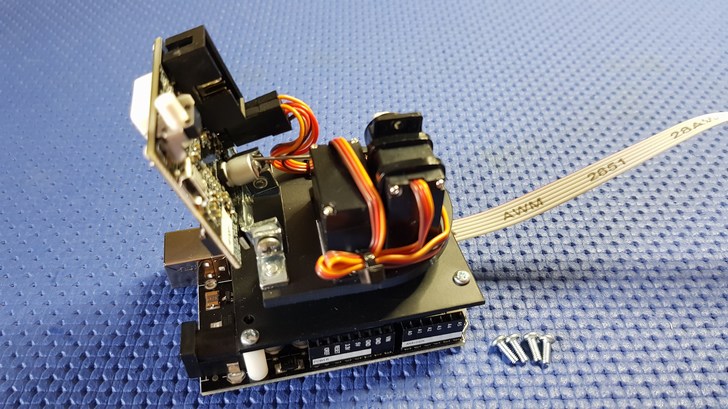
Fissare la base come mostrato

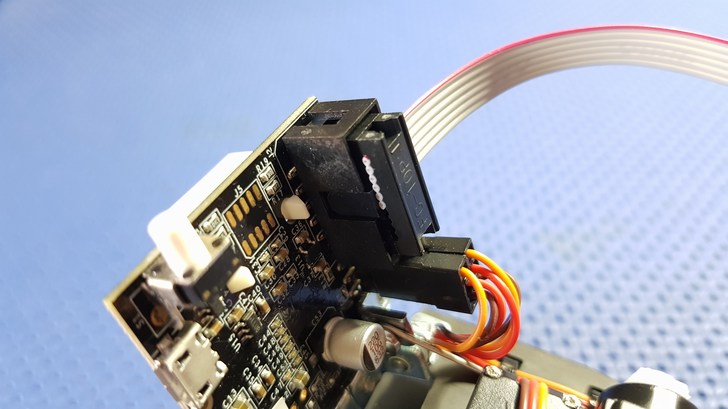
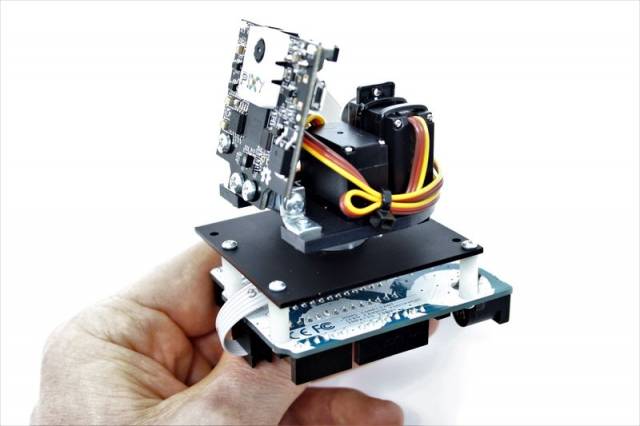
Fissare il connettore a 10 pin sul connettore della scheda Pixy2 come mostrato
Il montaggio della dispositivo di brandeggio è frinito
| Elenco revisioni | |
|
01/07/2019 |
Emissione preliminare |

