ultimo aggiornamento il 5 maggio 2009
|
|
ultimo aggiornamento il 5 maggio 2009 |
|
|
|
|
Per la sua
realizzazione sono necessari: N° 1 Scheda madre DeA Basic Stamp N° 1 Scheda Back Sensor DeA N° 1 Scheda raccolta cavi DeA N° 1 cavo di collegamento tra scheda raccolta cavi e scheda madre DeA N° 2 sensori di contatto (baffi) DeA N° 2 Servomotori DeA-Parallax completi di supporto e ruote N° 1 batteria ricaricabile al piombo da 6V N°2 faston per batteria completi di coprifaston N° 1 ruota piroettante N° 1 Barra di profilato ad L di alluminio 15x10x1 N° 1 barra di profilato quadro di alluminio 10x10x1 N° 1 barra d profilo piatto 20x2 N° 4 distanziali per circuito stampato l=30mm N° 6 distanziali per circuito stampato l=15mm N° 4 viti testa cilindrica M5X15 N° 8 dati M5 N° 4 rondelle spaccate Øi5,5 Viti con testa cilindrica M3 di varie lunghezze Dadi M3 Rondelle spaccate Øi3.2 Rondelle Øi3.2 Cavo per realizzazione collegamento tra batteria ricaricabile e la scheda raccolta cavi DeA.
|

Filmati inerenti il funzionamento del robot
 |
 |
 |
| Scheda madre | Scheda cavi | Scheda Back sensor |
Per quanti volessero realizzare i progetti presentati nel sito e non possedessero la scheda possono utilizzare la nuova scheda della Parallax denominata Scheda USB BoE +chip BS2 + Kit con la possibilità di collegamento tramite USB
|
|---|
|
|---|
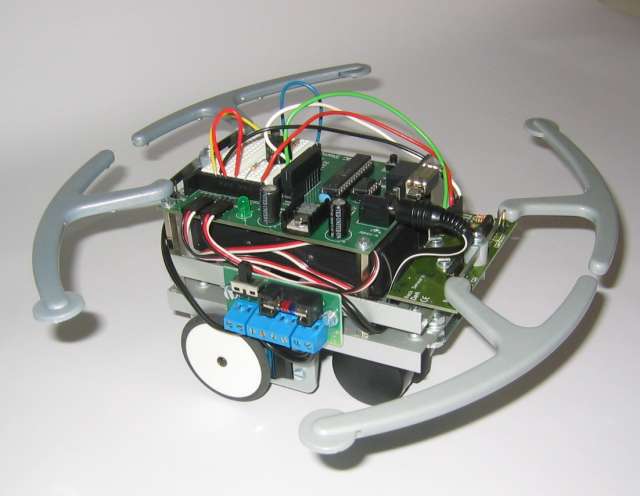
| ISTRUZIONI Seguendo i disegni allegati occorrerà tagliare i vari particolari tracciare le forature e quindi eseguire i fori possibilmente tramite un trapano a colonna. Quindi si passa al montaggio dei vari componenti, facendo riferimento al disegno di complessivo e alle foto. Per il fissaggio della batteria si utilizzerà un ritaglio di gomma piuma, va molto bene il materiale su cui forniti i componenti forniti dalla DeA. Montata la parte meccanica si passerà alla parte elettronica che consisterà principalmente nel realizzare il cavo di collegamento tra la batteria ricaricabile e la scheda raccolta cavi DeA e tra questa e la scheda madre. Quindi collegherà la scheda Back Sensor DeA alla scheda madre DeA Basic Stamp, si realizzerà sulla breadboard il circuito per il cicalino come visibile nella figura a lato Si monteranno quindi i sensori di contatto |
|
Alcune foto del progetto ROBBY |
||
 Lato destro |
 Dettaglio della scheda controllo |
 Lato sinistro |
| Elenco revisioni: | |
| 05/05/2009 | Aggiornato pagina, inserito filmati |
| 27/04/2007 | Aggiornato pagina |
| 13/10/2006 | Aggiornato pagina e aggiunto filmato robot con sensore suono |
| 06/06/2003 | Aggiunto disegni in formato PDF (prima erano solo in formato autoCAD14) validi per la costruzione dei robot |
| 10/02/2003 | Aggiunto foto del prototipo |
| 03/11/2002 | Emissione preliminare |